Appendix A
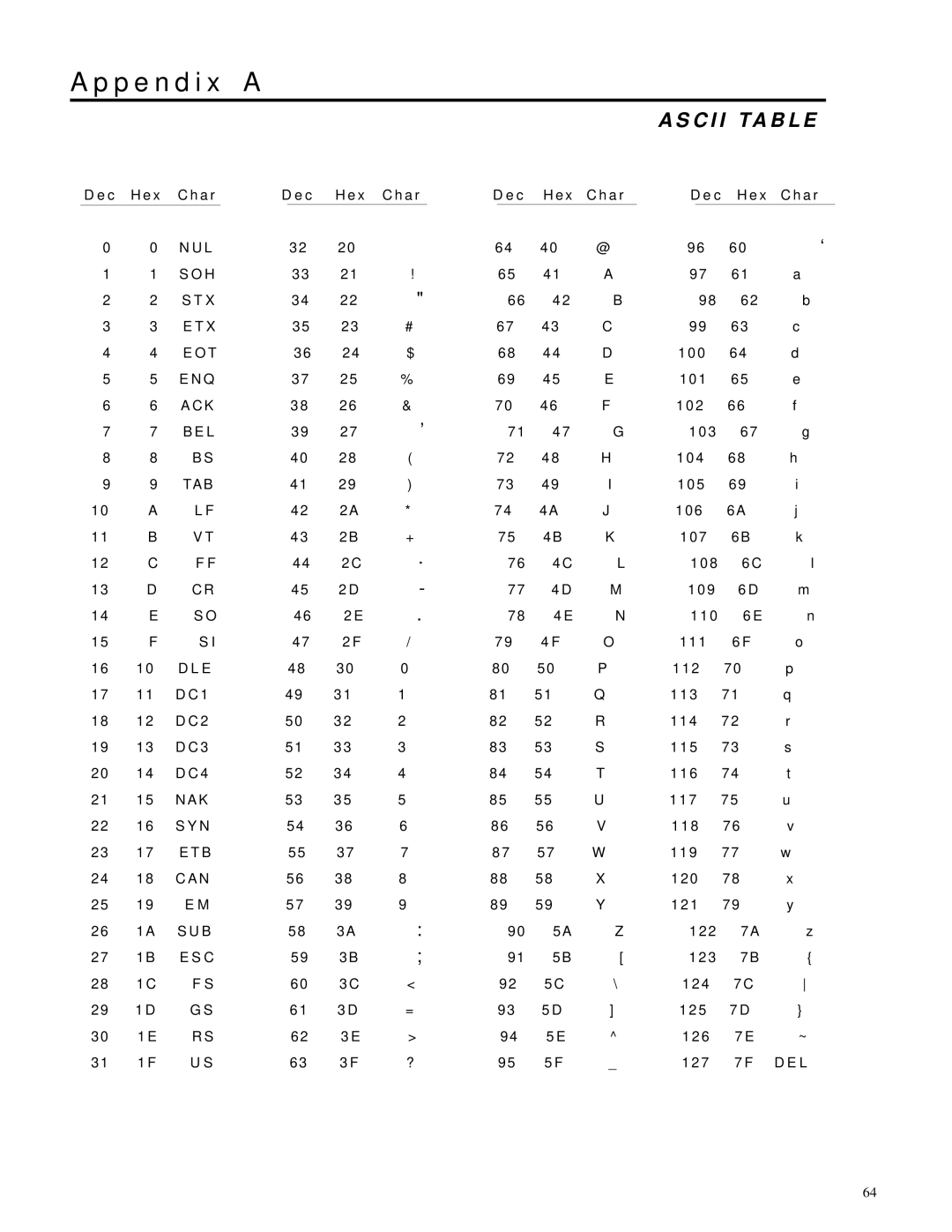
A S C I I TA B L E
D e c H e x C h a r | D e c H e x C h a r |
| D e c H e x C h a r |
| D e c H e x C h a r | |||||||||
0 | 0 N U L |
| 3 2 | 2 0 |
|
| 6 4 | 4 0 | @ |
| 9 6 | 6 0 | ` | |
1 | 1 S O H | 3 3 | 2 1 | ! | 6 5 | 4 1 | A | 9 7 | 6 1 | a | ||||
2 | 2 S T X | 3 4 | 2 2 | " | 6 6 | 4 2 | B | 9 8 | 6 2 | b | ||||
3 | 3 E T X | 3 5 | 2 3 | # | 6 7 | 4 3 | C | 9 9 | 6 3 | c | ||||
4 | 4 E O T | 3 6 | 2 4 | $ | 6 8 | 4 4 | D | 1 0 0 | 6 4 | d | ||||
5 | 5 E N Q | 3 7 | 2 5 | % | 6 9 | 4 5 | E | 1 0 1 | 6 5 | e | ||||
6 | 6 A C K | 3 8 | 2 6 | & | 7 0 | 4 6 | F | 1 0 2 | 6 6 | f | ||||
7 | 7 B E L | 3 9 | 2 7 | ' | 7 1 | 4 7 | G | 1 0 3 | 6 7 | g | ||||
8 | 8 | B S | 4 0 | 2 8 | ( | 7 2 | 4 8 | H | 1 0 4 | 6 8 | h | |||
9 | 9 TA B | 4 1 | 2 9 | ) | 7 3 | 4 9 | I | 1 0 5 | 6 9 | i | ||||
1 0 | A | L F | 4 2 | 2 A | * | 7 4 | 4 A | J | 1 0 6 | 6 A | j | |||
11 | B | V T | 4 3 | 2B | + | 7 5 | 4B | K | 1 0 7 | 6 B | k | |||
1 2 | C | F F | 4 4 | 2 C | ´ | 7 6 | 4 C | L | 1 0 8 | 6 C | l | |||
1 3 | D | C R | 4 5 | 2 D | - | 7 7 | 4 D | M | 1 0 9 | 6 D | m | |||
1 4 | E | S O | 4 6 | 2 E | . | 7 8 | 4 E | N | 1 1 0 | 6 E | n | |||
1 5 | F | S I | 4 7 | 2 F | / | 7 9 | 4 F | O | 1 1 1 | 6 F | o | |||
1 6 | 1 0 | D L E | 4 8 | 3 0 | 0 | 8 0 | 5 0 | P | 1 1 2 | 7 0 | p | |||
1 7 | 1 1 | D C 1 | 4 9 | 3 1 | 1 | 8 1 | 5 1 | Q | 1 1 3 | 7 1 | q | |||
1 8 | 1 2 | D C 2 | 5 0 | 3 2 | 2 | 8 2 | 5 2 | R | 1 1 4 | 7 2 | r | |||
1 9 | 1 3 | D C 3 | 5 1 | 3 3 | 3 | 8 3 | 5 3 | S | 1 1 5 | 7 3 | s | |||
2 0 | 1 4 | D C 4 | 5 2 | 3 4 | 4 | 8 4 | 5 4 | T | 1 1 6 | 7 4 | t | |||
2 1 | 1 5 | N A K | 5 3 | 3 5 | 5 | 8 5 | 5 5 | U | 1 1 7 | 7 5 | u | |||
2 2 | 1 6 | S Y N | 5 4 | 3 6 | 6 | 8 6 | 5 6 | V | 1 1 8 | 7 6 | v | |||
2 3 | 1 7 | E T B | 5 5 | 3 7 | 7 | 8 7 | 5 7 | W | 1 1 9 | 7 7 | w | |||
2 4 | 1 8 | C A N | 5 6 | 3 8 | 8 | 8 8 | 5 8 | X | 1 2 0 | 7 8 | x | |||
2 5 | 1 9 | E M | 5 7 | 3 9 | 9 | 8 9 | 5 9 | Y | 1 2 1 | 7 9 | y | |||
2 6 | 1 A S U B | 5 8 | 3 A | : | 9 0 | 5 A | Z | 1 2 2 | 7 A | z | ||||
27 | 1B E S C | 59 | 3 B | ; | 91 | 5B | [ | 1 2 3 | 7B | { | ||||
2 8 | 1 C | F S | 6 0 | 3 C | < | 9 2 | 5 C | \ | 1 2 4 | 7 C | ||||
2 9 | 1 D | G S | 6 1 | 3 D | = | 9 3 | 5 D | ] | 1 2 5 | 7 D | } | |||
3 0 | 1 E | R S | 6 2 | 3 E | > | 9 4 | 5 E | ^ | 1 2 6 | 7 E | ~ | |||
3 1 | 1 F | U S | 6 3 | 3 F | ? | 9 5 | 5 F | _ | 1 2 7 | 7 F D E L | ||||
64