SAT
COMMAND OVERVIEW FOR COMMAND BYTE
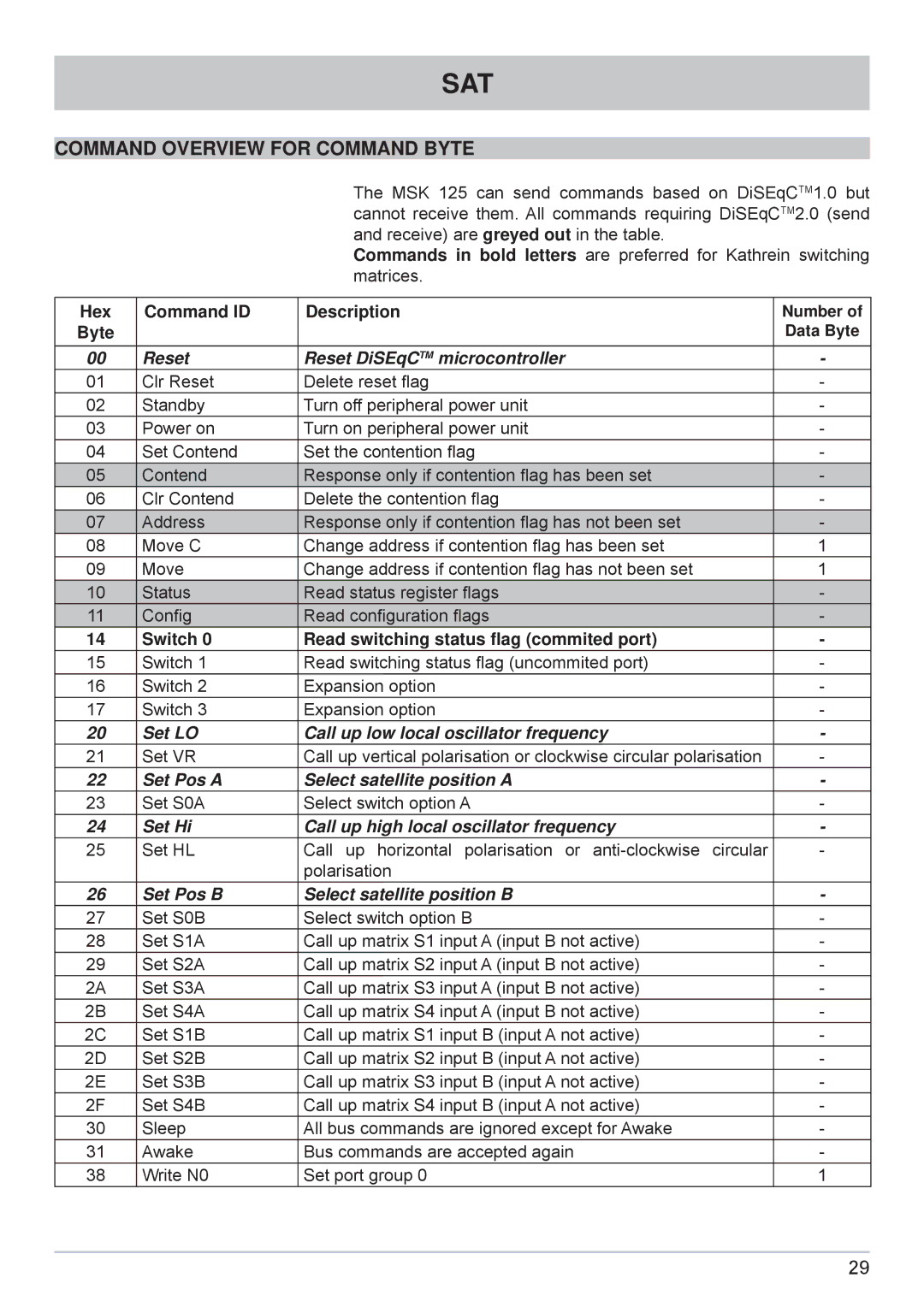
The MSK 125 can send commands based on DiSEqCTM1.0 but cannot receive them. All commands requiring DiSEqCTM2.0 (send and receive) are greyed out in the table.
Commands in bold letters are preferred for Kathrein switching matrices.
Hex | Command ID | Description | Number of |
Byte |
|
| Data Byte |
00 | Reset | Reset DiSEqCTM microcontroller | - |
01 | Clr Reset | Delete reset flag | - |
02 | Standby | Turn off peripheral power unit | - |
03 | Power on | Turn on peripheral power unit | - |
04 | Set Contend | Set the contention flag | - |
05 | Contend | Response only if contention flag has been set | - |
06 | Clr Contend | Delete the contention flag | - |
07 | Address | Response only if contention flag has not been set | - |
08 | Move C | Change address if contention flag has been set | 1 |
09 | Move | Change address if contention flag has not been set | 1 |
10 | Status | Read status register flags | - |
11 | Config | Read configuration flags | - |
14 | Switch 0 | Read switching status flag (commited port) | - |
15 | Switch 1 | Read switching status flag (uncommited port) | - |
16 | Switch 2 | Expansion option | - |
17 | Switch 3 | Expansion option | - |
20 | Set LO | Call up low local oscillator frequency | - |
21 | Set VR | Call up vertical polarisation or clockwise circular polarisation | - |
22 | Set Pos A | Select satellite position A | - |
23 | Set S0A | Select switch option A | - |
24 | Set Hi | Call up high local oscillator frequency | - |
25 | Set HL | Call up horizontal polarisation or | - |
|
| polarisation |
|
26 | Set Pos B | Select satellite position B | - |
27 | Set S0B | Select switch option B | - |
28 | Set S1A | Call up matrix S1 input A (input B not active) | - |
29 | Set S2A | Call up matrix S2 input A (input B not active) | - |
2A | Set S3A | Call up matrix S3 input A (input B not active) | - |
2B | Set S4A | Call up matrix S4 input A (input B not active) | - |
2C | Set S1B | Call up matrix S1 input B (input A not active) | - |
2D | Set S2B | Call up matrix S2 input B (input A not active) | - |
2E | Set S3B | Call up matrix S3 input B (input A not active) | - |
2F | Set S4B | Call up matrix S4 input B (input A not active) | - |
30 | Sleep | All bus commands are ignored except for Awake | - |
31 | Awake | Bus commands are accepted again | - |
38 | Write N0 | Set port group 0 | 1 |
29