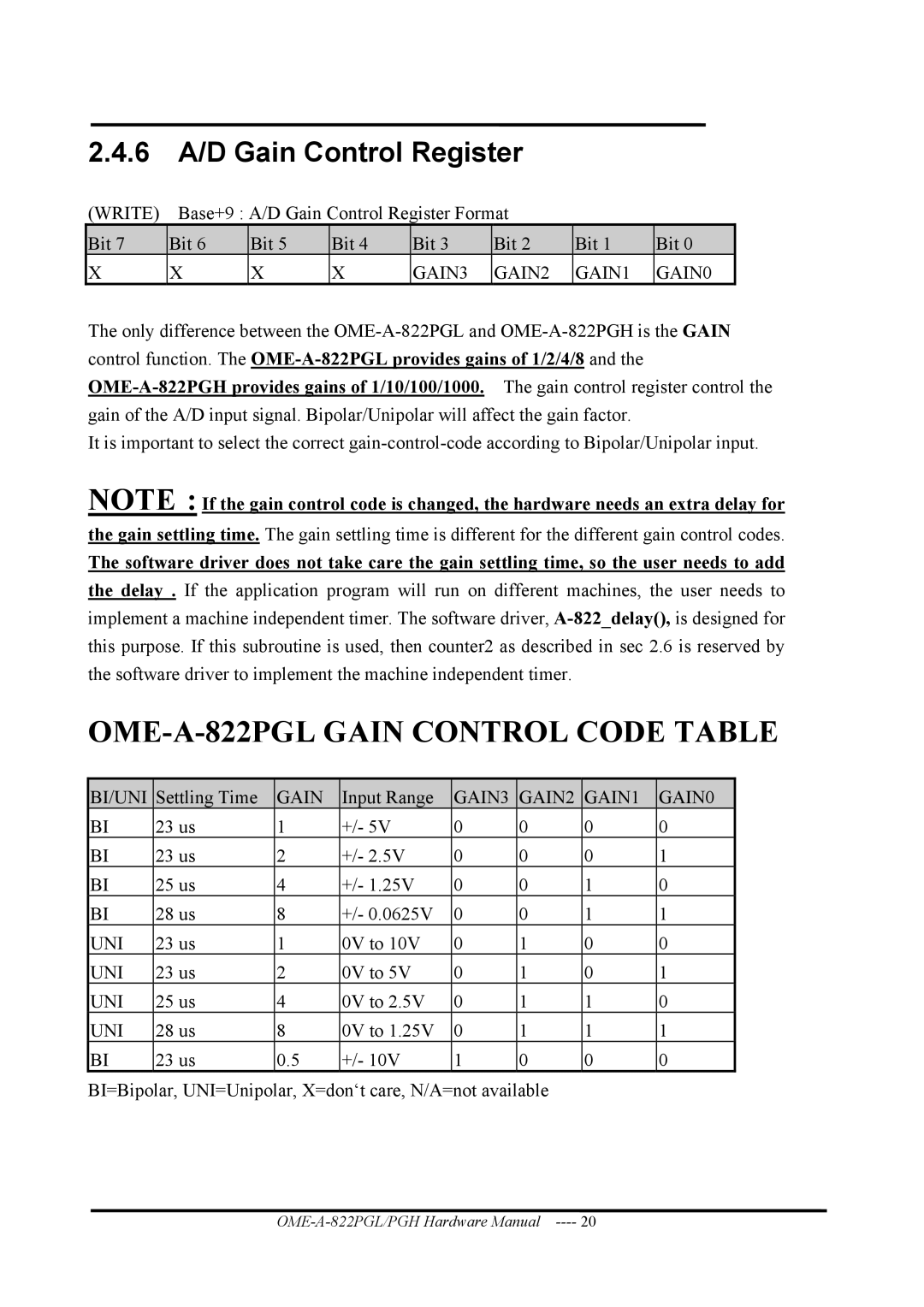
2.4.6A/D Gain Control Register
(WRITE) | Base+9 : A/D Gain Control Register Format |
|
| ||||
Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 |
X | X | X | X | GAIN3 | GAIN2 | GAIN1 | GAIN0 |
The only difference between the
It is important to select the correct
NOTE : If the gain control code is changed, the hardware needs an extra delay for
the gain settling time. The gain settling time is different for the different gain control codes.
The software driver does not take care the gain settling time, so the user needs to add
the delay . If the application program will run on different machines, the user needs to implement a machine independent timer. The software driver,
OME-A-822PGL GAIN CONTROL CODE TABLE
BI/UNI | Settling Time | GAIN | Input Range | GAIN3 | GAIN2 | GAIN1 | GAIN0 |
BI | 23 us | 1 | +/- 5V | 0 | 0 | 0 | 0 |
BI | 23 us | 2 | +/- 2.5V | 0 | 0 | 0 | 1 |
BI | 25 us | 4 | +/- 1.25V | 0 | 0 | 1 | 0 |
BI | 28 us | 8 | +/- 0.0625V | 0 | 0 | 1 | 1 |
UNI | 23 us | 1 | 0V to 10V | 0 | 1 | 0 | 0 |
UNI | 23 us | 2 | 0V to 5V | 0 | 1 | 0 | 1 |
UNI | 25 us | 4 | 0V to 2.5V | 0 | 1 | 1 | 0 |
UNI | 28 us | 8 | 0V to 1.25V | 0 | 1 | 1 | 1 |
BI | 23 us | 0.5 | +/- 10V | 1 | 0 | 0 | 0 |
BI=Bipolar, UNI=Unipolar, X=don‘t care, N/A=not available