ADVANCED MICRO SYSTEMS, INC. | SERIAL INTERFACE |
Interrupt Commands
Interrupt commands are single character commands that will interrupt the operation in process as follows:
Abort
Any action command may be terminated using the ESCape character.
Process | Resulting Action |
|
|
Command line input | Clear input buffer. |
Program mode | Exit without inserting “END”. |
Action command | Terminate all motion (HARD STOP). |
Program execution | Terminate execution, Hard Stop. |
If more then one process is active then ALL are aborted.
Abort is Global – all axis halt.
Soft Stop “@”
The Soft Stop “@” can be either a command (Immediate mode), or a single character interrupt (Program mode). The Soft Stop operates only when motion resulting from action commands or instructions is taking place.
Soft Stop Interrupt
After velocity deceleration, the process is terminated.
Process | Resulting Action |
|
|
Pending period | Decelerate and cancel pending instruction. |
Program execute | Decelerate then terminate execution. |
During PENDING PERIODS that are a result of multiple Constant Velocity commands
Jog Speeds, Homing
Jog input and home speed is a special case of the constant velocity command.
Note: In any mode, jogging and command reception are mutually exclusive. That is, a command canNOT be loaded while jogging and jogging canNOT be performed until the last command is complete. A command starts with the reception of the first command character.
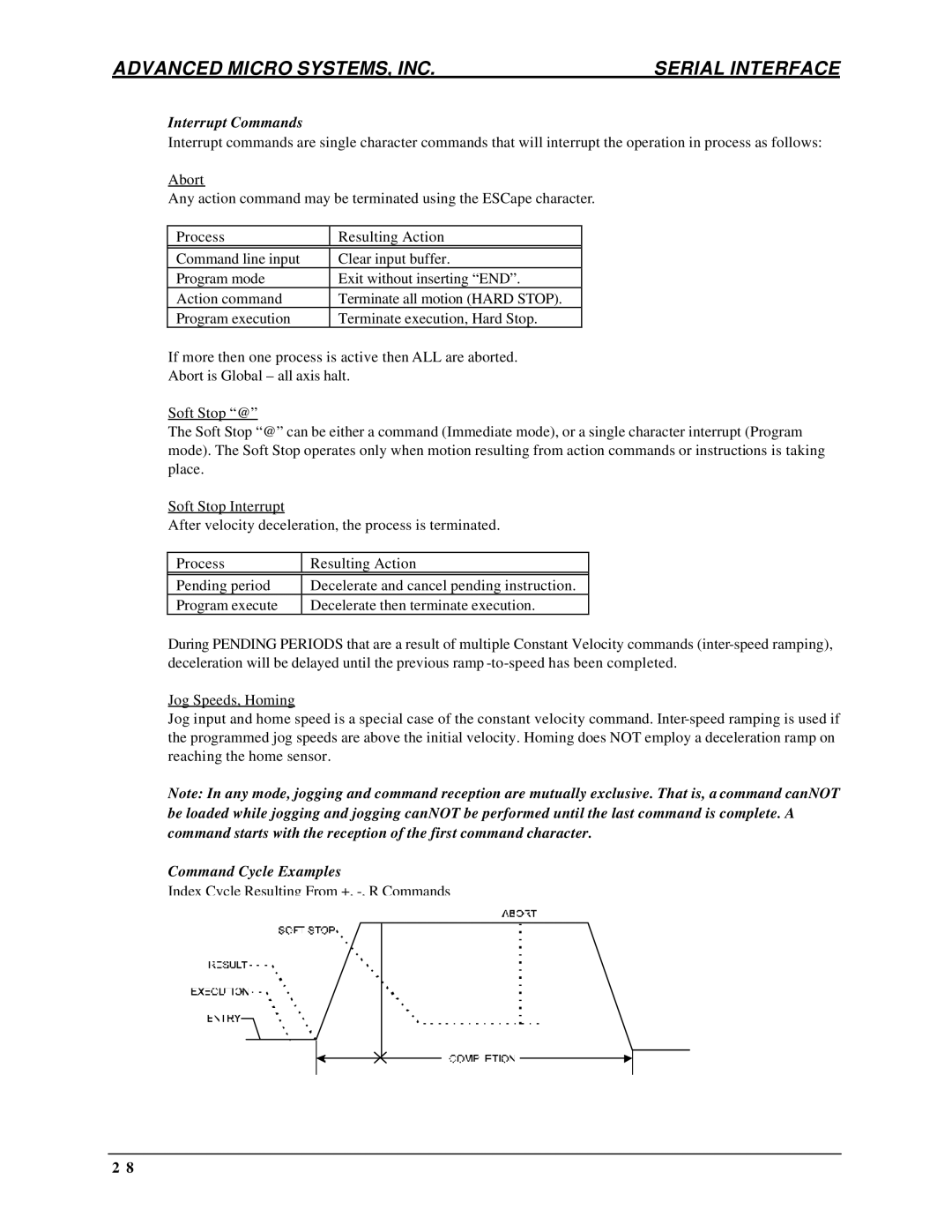
Command Cycle Examples
Index Cycle Resulting From +,
2 8