ADVANCED MICRO SYSTEMS, INC. |
Two or more flags can be specified for multiple options, i.e., flag 1 + flag 8= 9. So, command “l 9” will invert limits and set PLC mode. When reading flags, the host software must convert decimal to binary to evaluate the results.
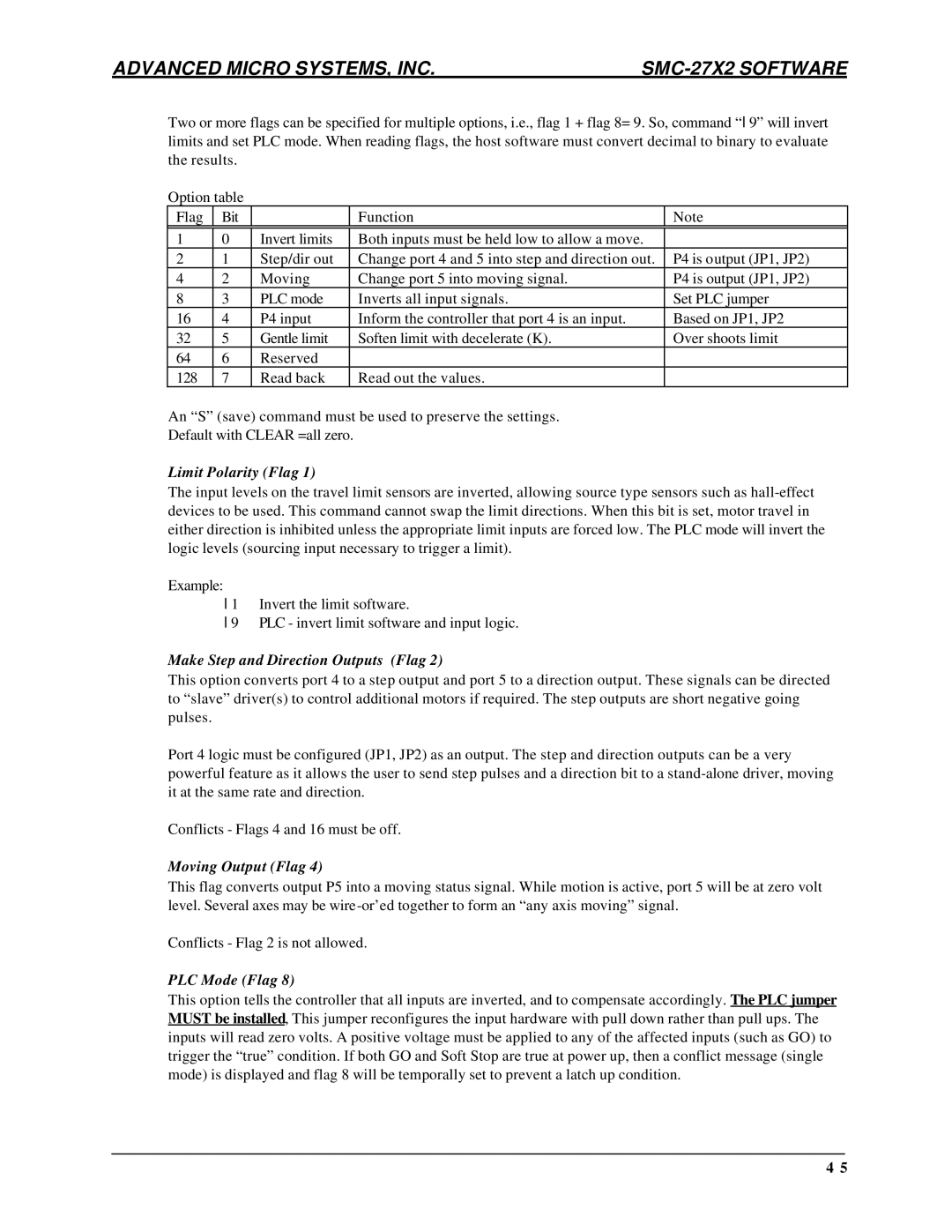
Option table
Flag | Bit |
| Function | Note |
|
|
|
|
|
1 | 0 | Invert limits | Both inputs must be held low to allow a move. |
|
2 | 1 | Step/dir out | Change port 4 and 5 into step and direction out. | P4 is output (JP1, JP2) |
4 | 2 | Moving | Change port 5 into moving signal. | P4 is output (JP1, JP2) |
8 | 3 | PLC mode | Inverts all input signals. | Set PLC jumper |
16 | 4 | P4 input | Inform the controller that port 4 is an input. | Based on JP1, JP2 |
32 | 5 | Gentle limit | Soften limit with decelerate (K). | Over shoots limit |
64 | 6 | Reserved |
|
|
128 | 7 | Read back | Read out the values. |
|
An “S” (save) command must be used to preserve the settings.
Default with CLEAR =all zero.
Limit Polarity (Flag 1)
The input levels on the travel limit sensors are inverted, allowing source type sensors such as
Example:
l 1 Invert the limit software.
l 9 PLC - invert limit software and input logic.
Make Step and Direction Outputs (Flag 2)
This option converts port 4 to a step output and port 5 to a direction output. These signals can be directed to “slave” driver(s) to control additional motors if required. The step outputs are short negative going pulses.
Port 4 logic must be configured (JP1, JP2) as an output. The step and direction outputs can be a very powerful feature as it allows the user to send step pulses and a direction bit to a
Conflicts - Flags 4 and 16 must be off.
Moving Output (Flag 4)
This flag converts output P5 into a moving status signal. While motion is active, port 5 will be at zero volt level. Several axes may be
Conflicts - Flag 2 is not allowed.
PLC Mode (Flag 8)
This option tells the controller that all inputs are inverted, and to compensate accordingly. The PLC jumper MUST be installed, This jumper reconfigures the input hardware with pull down rather than pull ups. The inputs will read zero volts. A positive voltage must be applied to any of the affected inputs (such as GO) to trigger the “true” condition. If both GO and Soft Stop are true at power up, then a conflict message (single mode) is displayed and flag 8 will be temporally set to prevent a latch up condition.
4 5