ADVANCED MICRO SYSTEMS, INC. |
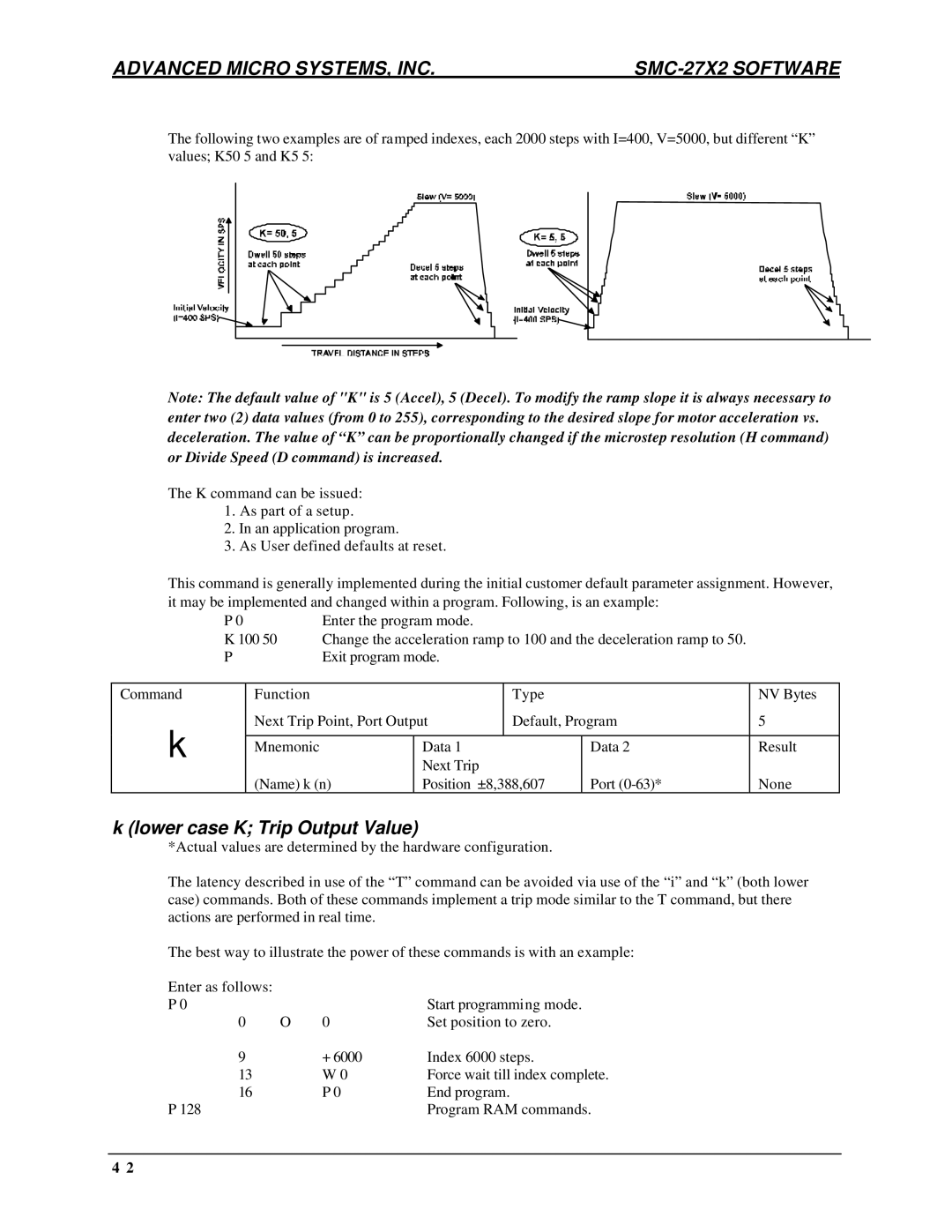
The following two examples are of ramped indexes, each 2000 steps with I=400, V=5000, but different “K” values; K50 5 and K5 5:
Note: The default value of "K" is 5 (Accel), 5 (Decel). To modify the ramp slope it is always necessary to enter two (2) data values (from 0 to 255), corresponding to the desired slope for motor acceleration vs. deceleration. The value of “K” can be proportionally changed if the microstep resolution (H command) or Divide Speed (D command) is increased.
The K command can be issued:
1.As part of a setup.
2.In an application program.
3.As User defined defaults at reset.
This command is generally implemented during the initial customer default parameter assignment. However,
it may be implemented and changed within a program. Following, is an example: |
| ||||||
| P 0 | Enter the program mode. |
|
|
| ||
| K 100 50 | Change the acceleration ramp to 100 and the deceleration ramp to 50. |
| ||||
| P | Exit program mode. |
|
|
| ||
|
|
|
|
|
|
|
|
Command |
| Function |
|
| Type |
| NV Bytes |
k |
| Next Trip Point, Port Output | Default, Program | 5 | |||
|
|
|
|
|
|
| |
| Mnemonic |
| Data 1 |
| Data 2 | Result | |
|
|
|
| ||||
|
|
|
| Next Trip |
|
|
|
|
| (Name) k (n) | Position ±8,388,607 | Port | None | ||
k (lower case K; Trip Output Value)
*Actual values are determined by the hardware configuration.
The latency described in use of the “T” command can be avoided via use of the “i” and “k” (both lower case) commands. Both of these commands implement a trip mode similar to the T command, but there actions are performed in real time.
The best way to illustrate the power of these commands is with an example:
Enter as follows: |
|
|
|
P 0 |
|
| Start programming mode. |
0 | O | 0 | Set position to zero. |
9 |
| + 6000 | Index 6000 steps. |
13 |
| W 0 | Force wait till index complete. |
16 |
| P 0 | End program. |
P 128 |
|
| Program RAM commands. |
4 2