Rosemount 5300/5400 Series
Manual Supplement
MODBUS
COMMUNICATION
PROTOCOL
CONFIGURATION
Table
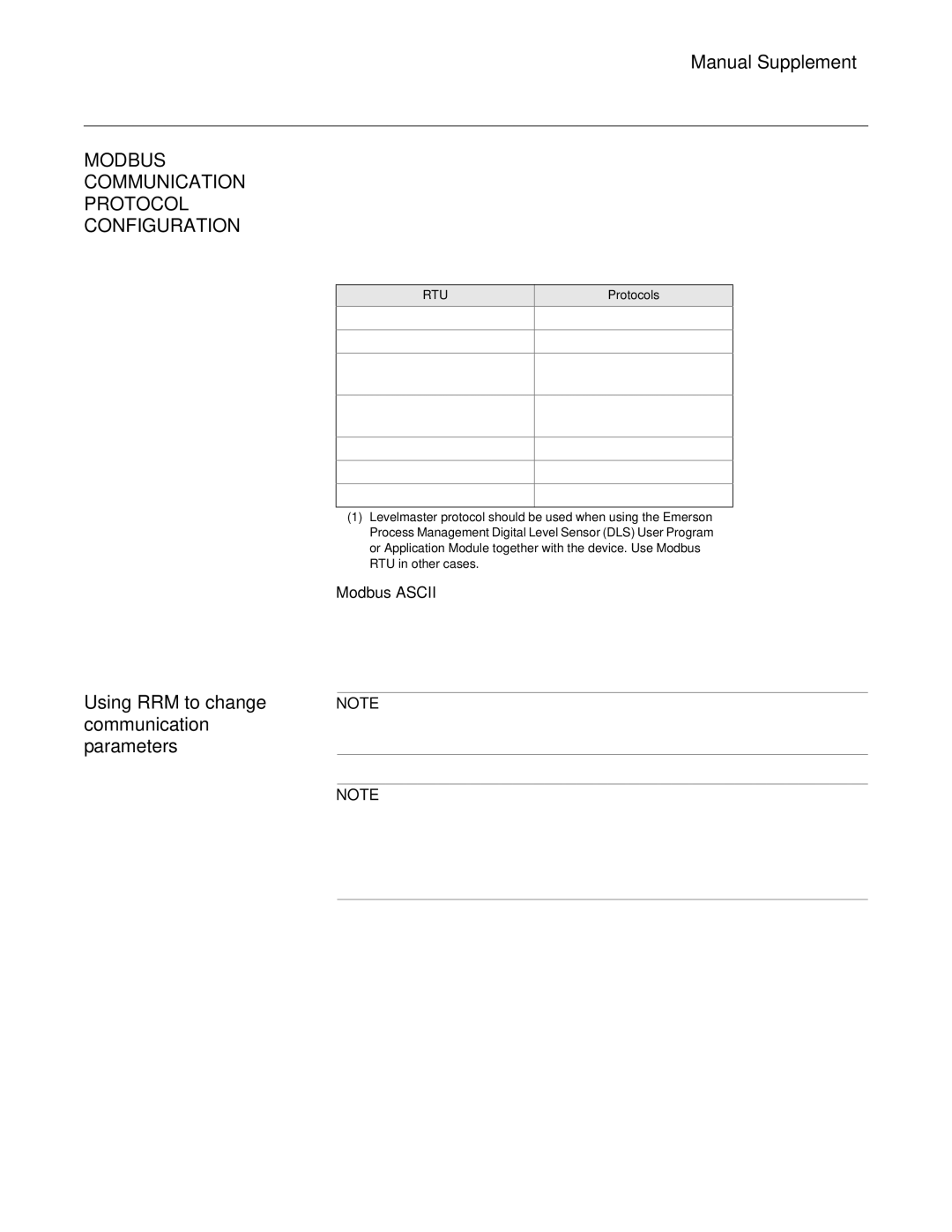
The Rosemount 5300/5400 level transmitter can communicate with RTUs using Modbus RTU (often referred to as just “Modbus”), Modbus ASCII, and Levelmaster (also known as “ROS,” “Siemens,” or “Tank” protocol).
RTU | Protocols |
ABB Totalflow | Modbus RTU, Levelmaster |
Bristol ControlWave Micro | Modbus RTU |
Emerson Process | Modbus RTU, Levelmaster(1) |
Management ROC800 Series |
|
Emerson Process | Modbus RTU, Levelmaster(1) |
Management FloBoss 107 |
|
Kimray DACC 2000/3000 | Levelmaster |
ScadaPack | Modbus RTU |
Thermo Electron Autopilot | Modbus RTU, Levelmaster |
|
|
Using RRM to change communication parameters
(1)Levelmaster protocol should be used when using the Emerson Process Management Digital Level Sensor (DLS) User Program or Application Module together with the device. Use Modbus RTU in other cases.
Modbus ASCII is not commonly used, since it doubles the amount of bytes for the same message as the Modbus RTU.
If you do not have any of these RTUs, check your RTU manual to see which protocols it supports.
NOTE
To change Modbus communication parameters, the Rosemount 5300/5400 must use HART address 1, the default address.
NOTE
After changing communication parameters, disconnect the HART modem and wait at least 60 seconds for the change to take effect.
In case the MA/MB terminals are used for connection to the HMC, disconnect the