Manuals
/
Fujitsu
/
Computer Equipment
/
Computer Drive
Fujitsu
MHA2021AT, MHA2032AT
manual
Physical sector servo configuration on disk surface
Models:
MHA2032AT
MHA2021AT
1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
177
Download
177 pages
49.28 Kb
51
52
53
54
55
56
57
58
59
60
Specifications
Install
Interface signals
Error Rate
Rotational delay
Dimension
Device Configuration
Power-on and reset
Diagnostic code
Command block registers
Page 56
Image 56
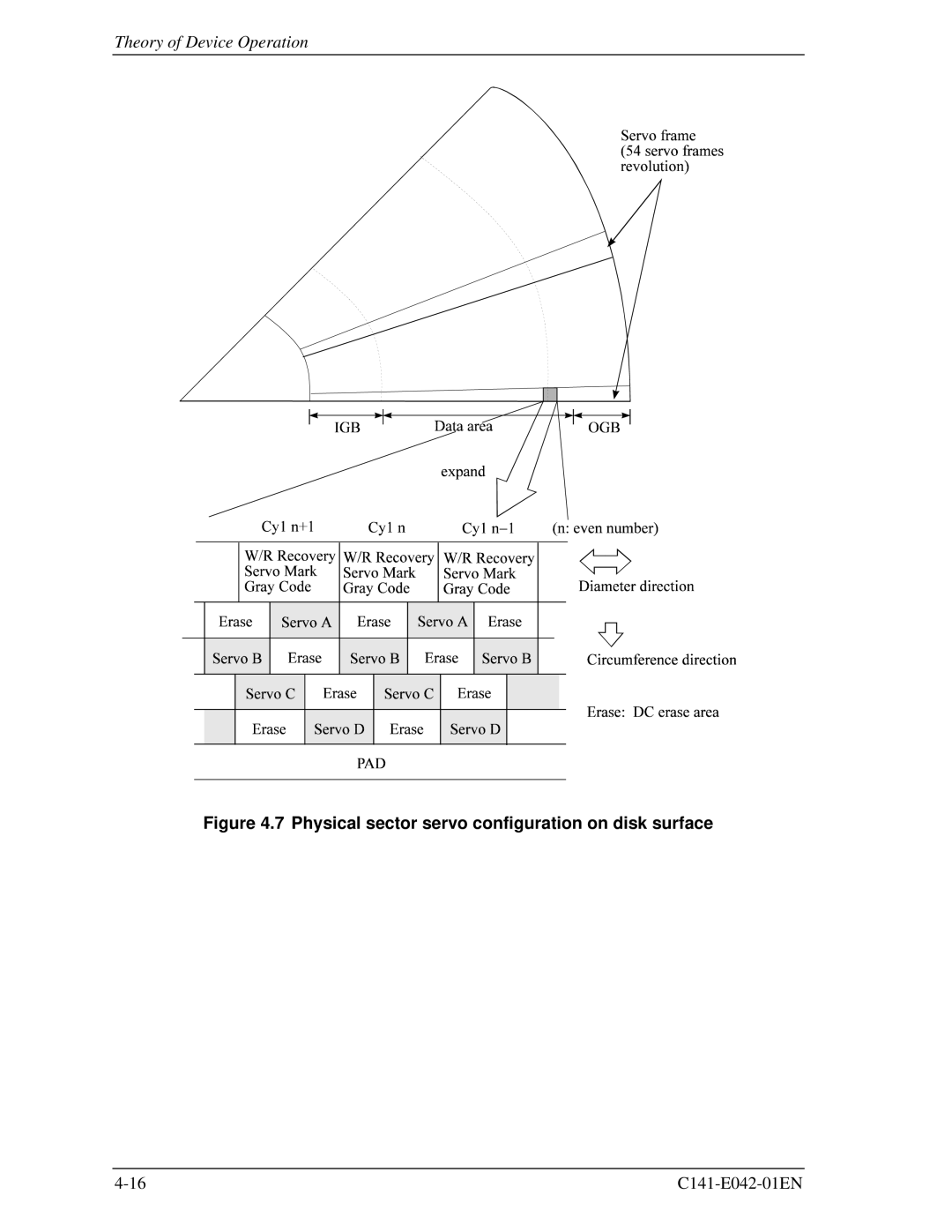
Theory of Device Operation
Figure 4.7 Physical sector servo configuration on disk surface
4-16
C141-E042-01EN
Page 55
Page 57
Page 56
Image 56
Page 55
Page 57
Contents
MHA2021AT, MHA2032AT
Disk Drives Product Manual
For Safe Operation
Handling of This Manual
Revision History
Preface
Overview of Manual
Abbreviation
Conventions for Alert Messages
Operating Environment
Liability Exception
Important Alert Items
Important Alert Messages
Contents
Contents
Interface
IN-1
GL-1
AB-1
Illustrations
Figures
Tables
C141-E042-01EN Xiii
Device Overview
Features
Functions and performance
Adaptability
Interface
Features
Device Specifications
Specifications summary
Specifications
MHA2021AT MHA2032AT
Power Requirements
Model and product number
MHA2021AT
Model names and product numbers
Current and power dissipation
Current fluctuation Typ. at +5V when power is turned on
Environmental Specifications
Environmental specifications
Acoustic noise specification
Acoustic Noise
Shock and vibration specification
Shock and Vibration
Reliability
MTBF=
Error Rate
Media Defects
Device Configuration
Device Configuration
Disk drive outerview
MHA2021ATMHA2032AT
2 1 drive connection
System Configuration
ATA interface
2 drives configuration
3 2 drives connection
Installation Conditions
Dimensions
Dimensions
Mounting
Orientation
PCA
Mounting frame structure
Measurement point Temperature DE cover
Service area
Device connector
Cable Connections
Cable connector specifications
Cable connector specifications
Device connection
Berg
Location of setting jumpers
Jumper Settings
Power supply connector CN1
Factory default setting
Master drive-slave drive setting
Csel setting
13 Example 1 of Cable Select
14 Example 2 of Cable Select
Theory of Device Operation
Outline
Subassemblies
Disk
Head
Air filter
Spindle
Actuator
Circuit Configuration
Circuit Configuration
Power-on Sequence
Self-calibration contents
Self-calibration
Execution timing of self-calibration
Command processing during self-calibration
Self-calibration execution timechart
Read/write Circuit
Read/write preamplifier PreAMP
Write circuit
Write precompensation algorithm
Read/write circuit block diagram
Frequency characteristic of programmable filter
Read circuit
Time base generator circuit
Write clock freqeuncy and recording density BPI of each zone
Servo Control
Servo control circuit
Servo Control
Physical sector servo configuration on disk surface
Servo Control
Data-surface servo format
Servo frame format
Actuator motor control
Spindle motor control
Servo Control
Interface
Physical Interface
Interface signals
Signal assignment on the connector
Encsel
Signal assignment on the interface connector
Dasp GND
MSTR, I, Master/slave setting
Pidag
Dasp
Logical Interface
1 I/O registers
I/O registers
DA2 DA1 DA0
Command block registers
Icrc UNC
Logical Interface
DEV HS3 HS2 HS1 HS0
ERR
BSY
DSC DRQ
Interface
Srst
Host Commands
Control block registers
Command code and parameters
Command code and parameters 1
Command code and parameters 2
Command descriptions
Host Commands
MSB
Read Multiple X’C4’
Host Commands
Execution example of Read Multiple command
Host Commands
Interface
Host Commands
1F7 HCM 1F6 HDH Start head No. /LBA
Write Multiple X’C5’
Start head No. /LBA
Write Verify X’3C’
Interface
Host Commands
Initialize Device Parameters X’91’
Identify Device X’EC’
Information to be read by Identify Device command 1
Word Value Description
Information to be read by Identify Device Command 2
Host Commands
Information to be read by Identify Device Command 3
Identify Device DMA X’EE’
SET Features X’EF’
Features register values and settable modes
Host Commands
SET Multiple Mode X’C6’
Host Commands
Execute Device Diagnostic X’90’
Diagnostic code
Interface
Host Commands
Write Buffer X’E8’
Host Commands
’97’ or X’E3’
’95’ or X’E1’
’96’ or X’E2’
At command issuance I/O registers setting contents 1F7 HCM
’FF’
’98’ or X’E5’
Features Register values subcommands and functions
Smart Return Status
Format of device attribute value data
1FF
Format of insurance failure threshold value data
Interface
10 Contents of security password
Interface
Host Commands
Interface
∙ Read Sectors ∙ Write Sectors ∙ Write Vetif
11 Contents of Security SET Password data
Cancel Locked Mode
Interface
Error posting
13 Command code and parameters 1
13 Command code and parameters 2
Execute Device Diagnostic Initialize Device Parameters
Command Protocol
Data transferring commands from device to host
Read Sectors command protocol
Data transferring commands from host to device
Protocol for command abort
Write Sectors command protocol
Commands without data transfer
Protocol for the command execution without data transfer
Other commands
DMA data transfer commands
Read Multiple Sleep Write Multiple
Read DMA Write DMA
Normal DMA data transfer
Timing
PIO data transfer
Data transfer timing
Single word DMA data transfer timing mode
Single word DMA data transfer
Power-on and reset
Multiword DMA data transfer
11 Power on Reset Timing
Operations
Device Response to the Reset
Response to power-on
Response to power-on
Response to hardware reset
Response to hardware reset
Response to software reset
Response to software reset
Response to diagnostic command
Response to diagnostic command
Address Translation
Default parameters
Default parameters
Address translation example in CHS mode
Logical address
Power Save
Power save mode
Operations
Power commands
Defect Management
Spare area
Alternating defective sectors
Alternate cylinder assignment
Caching operation
Data buffer configuration
Read-Ahead Cache
− Read Sector S − Read DMA
Read Sector S Read Multiple Read DMA
− Write Sectors − Write DMA − Write Multiple
Usage of read segment
Following shows the cache enabled data for next read command
HAP
DAP
Read-ahead data New read-ahead data Hit data
Finally, the cache data in the buffer is as follows
Last LBA
Write Cache
Write Cache
Glossary
Power save mode
Rotational delay
PIO Programmed input-output
Positioning
Status
VCM
Acronyms and Abbreviations
Index
Index
Initialize Device Parameters
Index
SET Features
IN-6 C141-E042-01EN
Japan
Comment Form
MHA2021AT, MHA2032AT Disk Drives Product Manual
C141-E042-01EN
Top
Page
Image
Contents