4. INSTALLATION
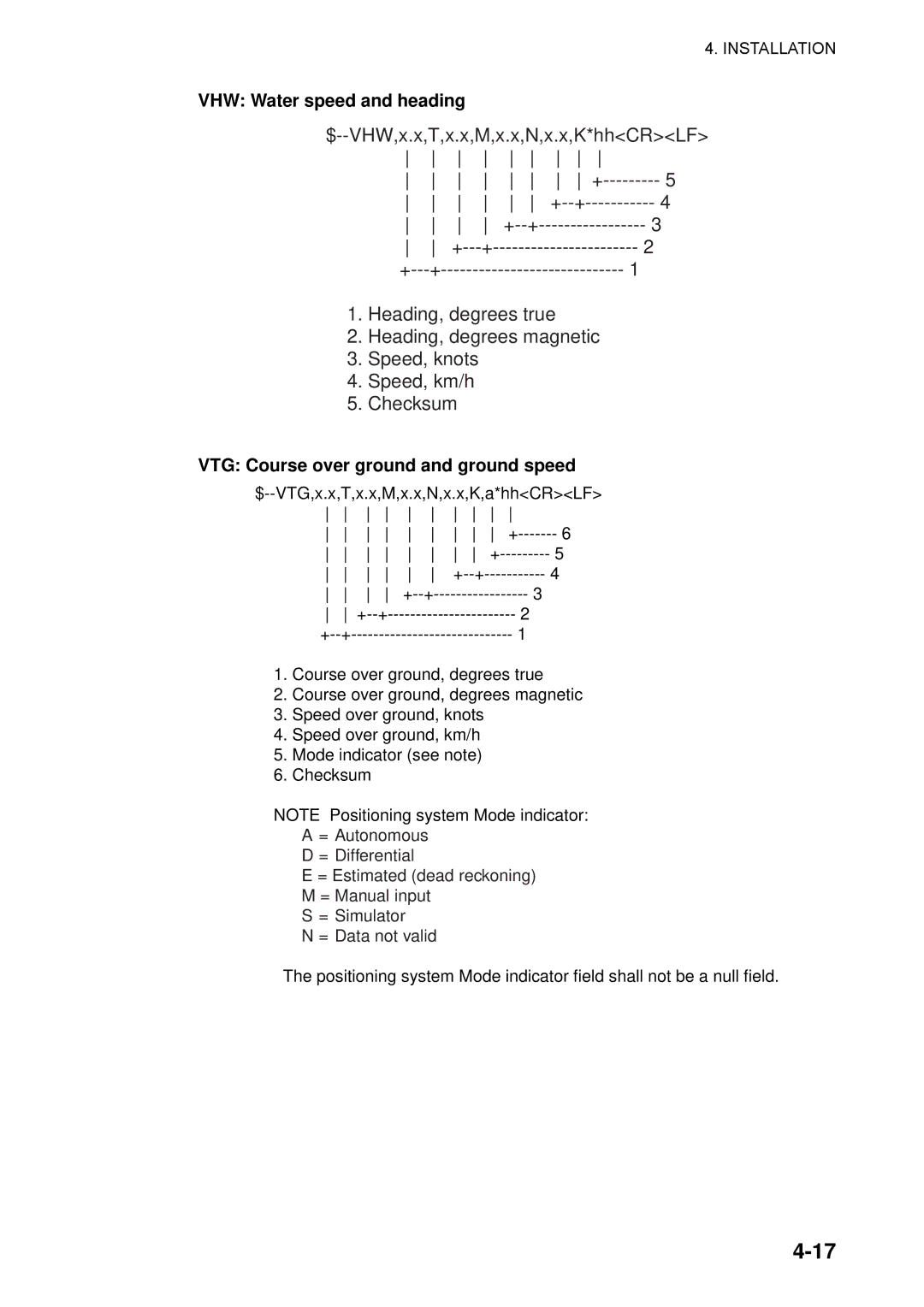
VHW: Water speed and heading
| |||||||||
+ | |||||||||
+ | 4 | ||||||||
+ |
| 3 | |||||||
+ |
|
|
| 2 | |||||
+ |
|
|
|
|
| 1 | |||
1.Heading, degrees true
2.Heading, degrees magnetic
3.Speed, knots
4.Speed, km/h
5.Checksum
VTG: Course over ground and ground speed
| |||||||||
| 6 | ||||||||
5 | |||||||||
+ | 4 | ||||||||
|
| 3 | |||||||
|
|
| 2 |
| |||||
+ |
|
|
|
| 1 |
| |||
1.Course over ground, degrees true
2.Course over ground, degrees magnetic
3.Speed over ground, knots
4.Speed over ground, km/h
5.Mode indicator (see note)
6.Checksum
NOTE Positioning system Mode indicator:
A = Autonomous
D = Differential
E = Estimated (dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
The positioning system Mode indicator field shall not be a null field.