2. Presentation
Working method
The Automower automatically mows the lawn. It continuously combines mowing and charging.
The charging station sends out a signal that the Automower can sense at a distance of 20 - 23 ft. The mower starts to search for the charging station when the battery charge becomes too low. The Automower does not mow when it is searching for the charging station.
When Automower searches for the charging station it uses one or more of three different search methods: Irregular, Follow loop in and Follow guide wire. For more information about the search methods, see 2.3 Search method on page 15 and Follow loop in
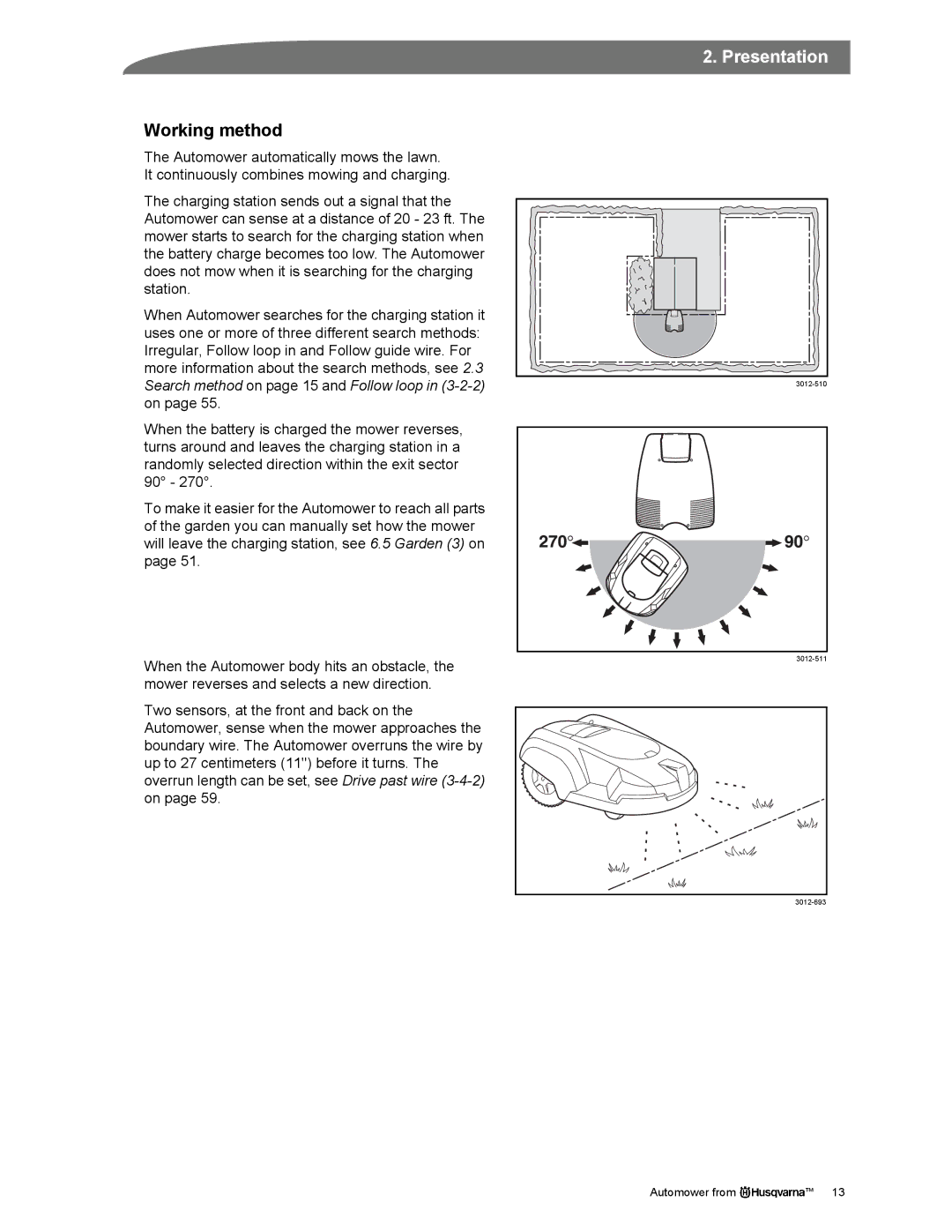
When the battery is charged the mower reverses, turns around and leaves the charging station in a randomly selected direction within the exit sector 90° - 270°.
To make it easier for the Automower to reach all parts of the garden you can manually set how the mower will leave the charging station, see 6.5 Garden (3) on page 51.
When the Automower body hits an obstacle, the mower reverses and selects a new direction.
Two sensors, at the front and back on the Automower, sense when the mower approaches the boundary wire. The Automower overruns the wire by up to 27 centimeters (11") before it turns. The overrun length can be set, see Drive past wire
Automower from | ™ 13 |