Series 15H
Table of Contents
Speed Adjustment using Local Speed Reference
Section
Iv Table of Contents MN715
Overview
Quick Start Checklist
Initial Conditions
CE Compliance
Section General Information
Limited Warranty
Precautions
General Information MN715
Receiving & Inspection
Physical Installation
Series 15H Watts Loss Ratings
Enclosure Size 230VAC 460VAC 575VAC 5kHz PWM 0kHz PWM
Keypad Installation Procedure
Control Installation
Shock Mounting
Through the Wall Mounting
Mounting Instructions For clearance mounting holes
Tools Required
Mounting Instruction For tapped mounting holes
System Grounding
Electrical Installation
System Grounding Ungrounded Distribution System
Input Power Conditioning
Line Impedance
Line Reactors
AWG
AC Main Circuit
460VAC Controls 3 Phase Wire Size and Protection Devices
4575VAC Controls 3 Phase Wire Size and Protection Devices
Control Board Jumpers
Series 15H Control
Examples
Tap change procedure size C, D, E and F controls
AC Line Connections
Baldor Series 15H Control
Phase Installation
Control Transformer Tap Change Procedure size G controls
17.5
Jumper Configuration
Size A, B and B2 Single Phase Power Installation See Figure
Single phase 2 wire Connections
Size C2 Single Phase Power Installation
Single phase 3 wire Connections
9Jumper Configuration
Size C and D Single Phase Power Installation
J100
Size D2 Single Phase Power Installation
Baldor Series 15H Control Single phase 2 wire Connections
Size E Single Phase Power Installation
Baldor
Size F Single Phase Power Installation
Contactor
Motor Connections
19 DB Terminal Identification
Optional Dynamic Brake Hardware
Voltage Rating Watts Rating Wire Size
Dynamic Brake Wire Size for RGA, RBA and RTA Assemblies
Control + / B- and R1 / R2 D1 / D2 Braking Option Terminals
Mm2 Volt
23 Control Signal Connections
Selection of Operating Mode and Connection Diagram
Analog Input
Analog Input #1
Analog Input #2
Analog Outputs
25 Keypad Control Connection Diagram
Keypad Operating Mode see Figure
5KW
Standard Run 3 Wire Operating Mode
Function J4-11 J4-12 J4-13 J4-14
Speed 2-Wire Operating Mode
Switch Truth Table for 15 Speed, 2 Wire Control Mode
J4-11 J4-13 J4-14 J4-15 Command
Fan Pump 2 Wire Operating Mode
10 Speed Select Table Fan Pump, 2 Wire
J4-13 J4-14 J4-15 Command
Fan Pump 3 Wire Operating Mode
11 Speed Select Table Fan Pump, 3 Wire
J4-14 J4-15 Command
Speed Analog 2 Wire Operating Mode
31 3 Speed Analog, 3 Wire Control Connection Diagram
Speed Analog 3 Wire Operating Mode
J4-11 J4-12 Command
Electronic Pot 2 Wire Operating Mode
33 EPOT, 3 Wire Control Connection Diagram
Electronic Pot 3 Wire Operating Mode
15 Process Mode Input Signal Compatibility
Opto-Isolated Inputs
External Trip Input
Opto Inputs Closing to Ground Opto Inputs Closing to +VCC
User VCC = 10 30VDC External Power Source
Digital Outputs
Relay Outputs
39 Opto-Output Equivalent Circuit
Check of Motor and Couplings
Pre-Operation Checklist
Check of Electrical Items
Down Arrow
UP Arrow
Adjusting Display Contrast
Display Mode
Display Screens
Action Description Display Comments
Parameter Status
Program Mode
Parameter Blocks Access for Programming
Changing Parameter Values when Security Code Not Used
Reset Parameters to Factory Settings
Initialize New Software Eeprom
Operation Examples Operating the Control from the Keypad
Speed Adjustment Using Arrow Keys
Speed Adjustment using Local Speed Reference
Security System Changes
Changing Parameter Values with a Security Code in Use
Security System Access Timeout Parameter Change
Parameter Definitions Version S15H-5.06
Decel Time #1,2
Parameter Block Definitions Level
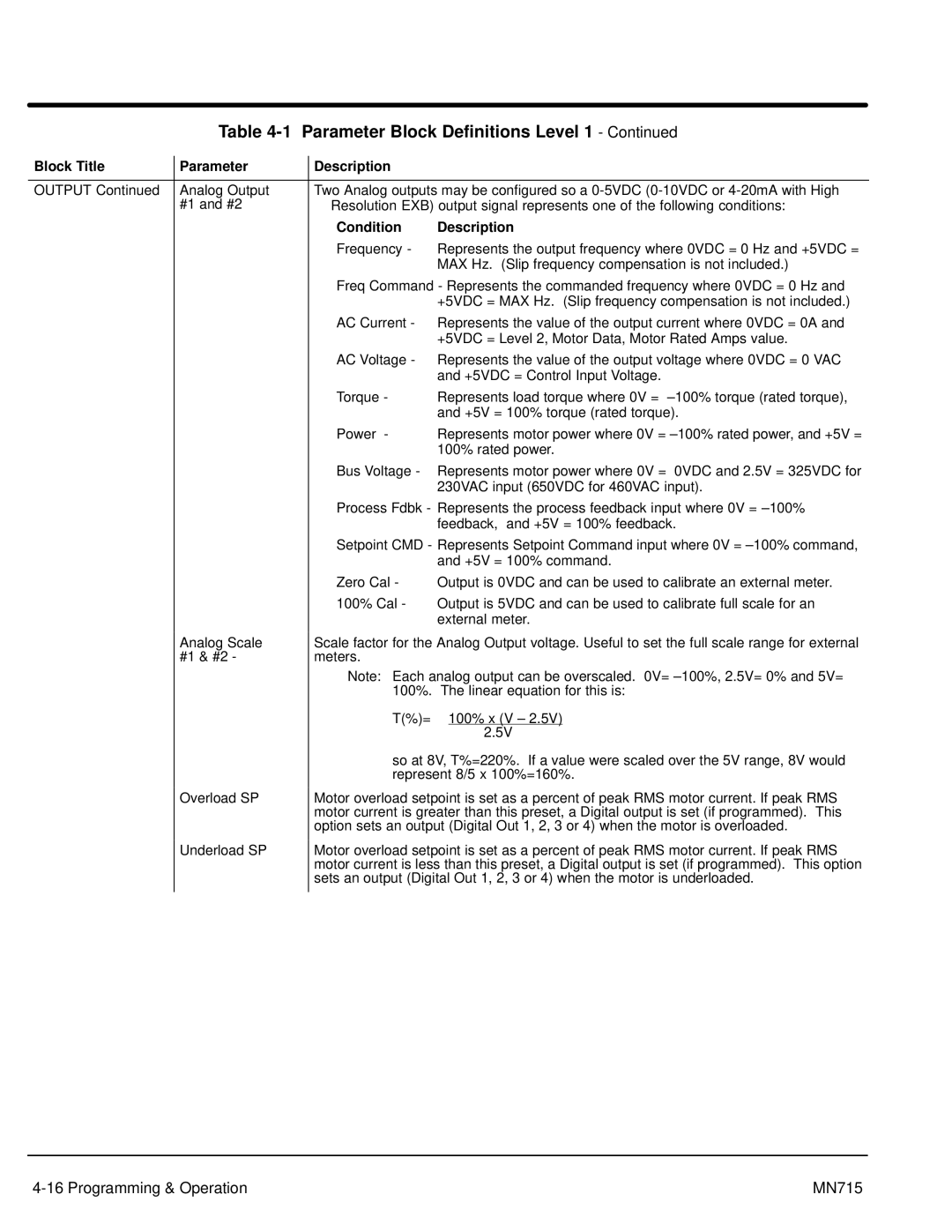
Block Title Parameter Description
Input
Keypad Setup
On makes the keypad REV key active in Local
Condition Description
Output
100% rated power
Level 2 Block Enters Level 2 Menu
Block Title Parameters Description
Custom Units
Block Title
Output Limits
Miscellaneous
Protection
Manual
Automatic
Security
Brake Adjust
Control
Motor Data
Process
Frequency
Skip
Synchro
Starts
No Keypad Display Display Contrast Adjustment
Section Troubleshooting
How to Access Diagnostic Information
Action Description Display Comments
Fault Message Description
Fault Messages
Power Base ID Series 15H
Power Base ID
Indication Possible Cause Corrective Action
Troubleshooting
Control does not recognize hp
Sens
FLT
Electrical Noise Considerations
Wires between Controls and Motors
Relay and Contactor Coils
AC Coil RC snubber
Special Motor Considerations
Special Drive Situations
Section Specifications and Product Data
Control Specifications
Analog Outputs 2 Outputs
Catalog Input Constant Torque Variable Torque Size Volt
Ratings Series 15H Stock Products
Ratings Series 15H Stock Products
Output Input Amp
Ratings Series 15H Custom Control
Ratings Series 15H Custom Control w/Internal DB Transistor
D1/D2 Catalog No Lb-in
Tightening Torque 230 VAC Power TB1 Ground Control J1
Tightening Torque 460 VAC Power TB1 Ground Control J1
Terminal Tightening Torque Specifications
D1/D2 Lb-in
Catalog No Lb-in
Tightening Torque 575 VAC Power TB1 Ground Control J1
D1/D2
Mounting Dimensions Size a Control
Dimensions Size B Control
Dimensions Size B2 Control
Dimensions Size C Control
Dimensions Size C2 Control
Dimensions Size C2 Control Through-Wall Mounting
Customer AIR Inlet Power Connections
Dimensions Size D Control
13.00 24.00 607 23.00 585
Dimensions Size D2 Control
Dimensions Size D2 Control Through-Wall Mounting
Dimensions Size E Control
Non-Regen with DC Link Inductor
Dimensions Size F Control
Standard Regen & Non-Regen
Dimensions Size G Control
Dimensions Size G2 Control
Dimensions Size G+ Control
Dimensions Size H Control
Dynamic Braking DB Hardware
Selection Procedure
Table A-1
Parameter Description Control Input Voltage
Friction Lb.Ft
15H Catalog Numbers with an EO or MO Suffix
Rated HP Watts
15H Catalog Numbers with an ER or MR Suffix
Dynamic Braking DB Hardware
RGA Assemblies
Table A-2 Dynamic Braking Resistor Assemblies RGA
Table A-3 Dynamic Braking Assemblies RBA
RBA Assemblies
Cont Catalog Watts
150 200 250
Table A-4 Dynamic Braking Transistor Assemblies
RTA Assemblies
Table B-1 Parameter Block Values Level
At Set Speed
Zero Speed
Analog OUT #2
Output Analog OUT #1
Analog #1 Scale
Analog #2 Scale
Table B-2 Parameter Block Values Level
Setpoint Command
Adjust Resistor Watts
Motor Data Motor Voltage
Motor Rated Amps
Sync V/F Recover
Sync Setup Time
Skip Frequency Skip Freq #1
Skip Band #1
Appendix C
340 810 500 250
Remote Keypad Mounting Template
500
Baldor Electric Company MN715 03 C&J10000
Baldor Electric Company
Series 15H Inverter Control MN715