6.1.1Response to power-on
After the master device (device 0) releases its own
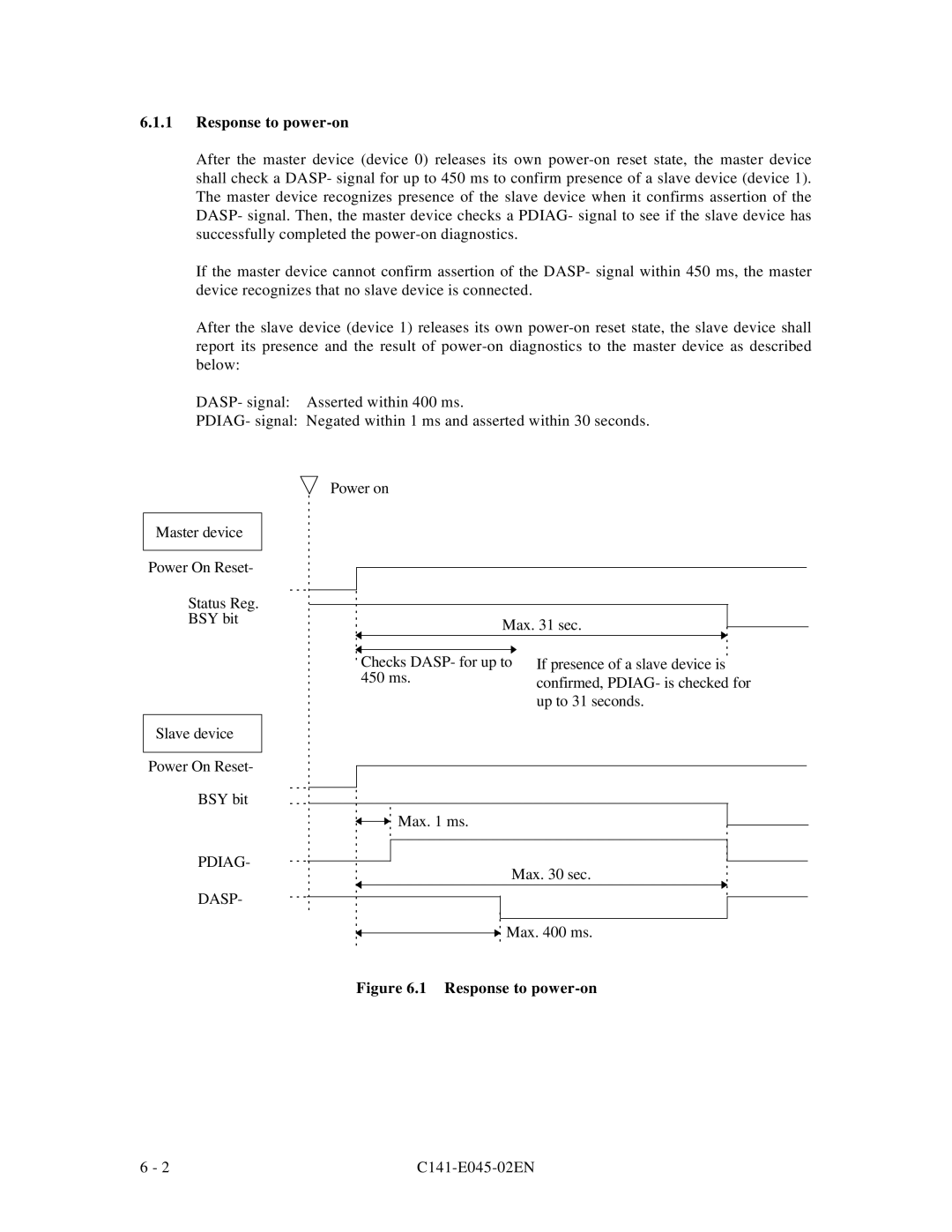
If the master device cannot confirm assertion of the DASP- signal within 450 ms, the master device recognizes that no slave device is connected.
After the slave device (device 1) releases its own
DASP- signal:
PDIAG- signal:
Master device
Power On Reset-
Status Reg.
BSY bit
Asserted within 400 ms.
Negated within 1 ms and asserted within 30 seconds.
Power on
Max. 31 sec.
Checks DASP- for up to | If presence of a slave device is |
450 ms. | confirmed, PDIAG- is checked for |
| up to 31 seconds. |
Slave device
Power On Reset-
BSY bit
Max. 1 ms.
PDIAG-
Max. 30 sec.
DASP-
![]() Max. 400 ms.
Max. 400 ms.
Figure 6.1 Response to power-on
6 - 2 |