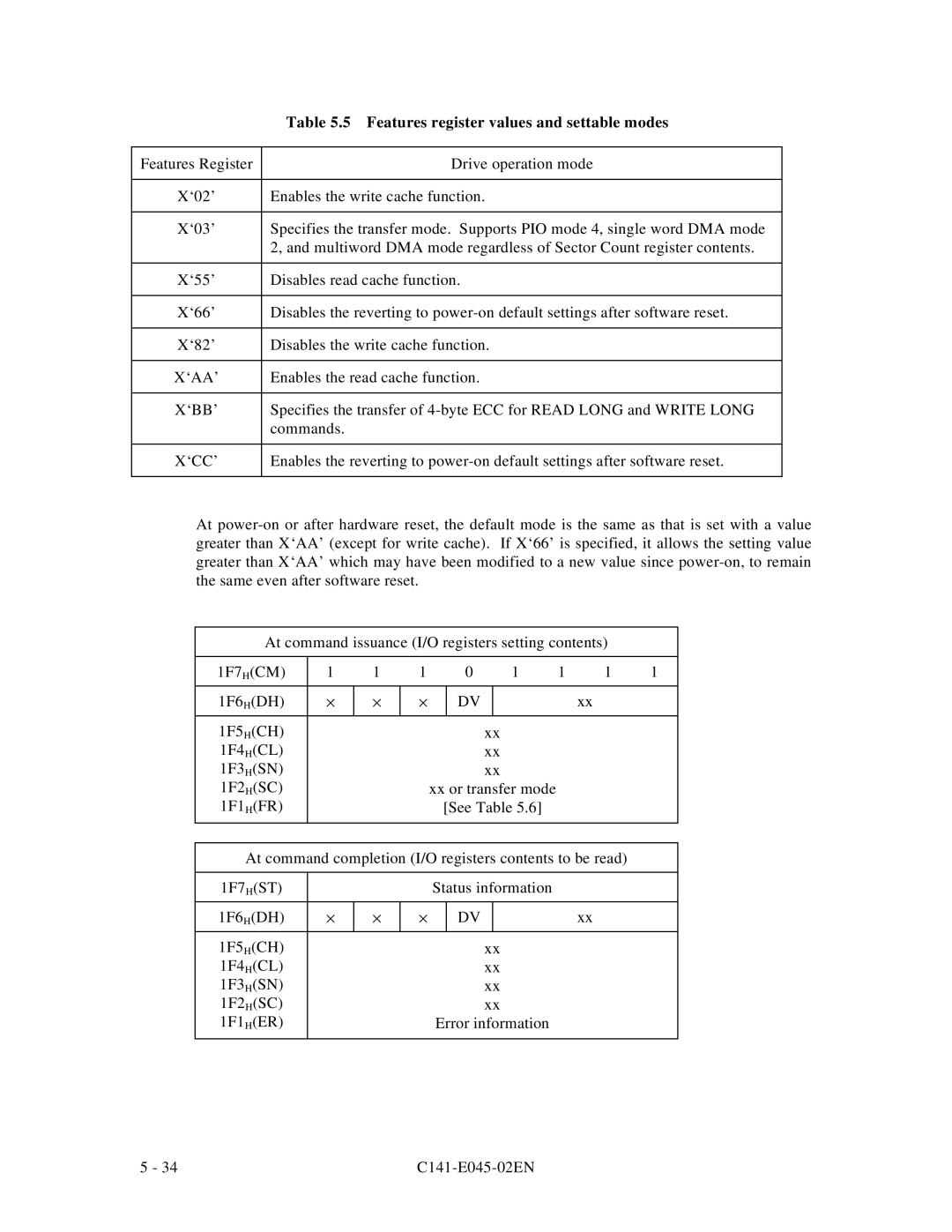
| Table 5.5 Features register values and settable modes |
|
|
Features Register | Drive operation mode |
|
|
X‘02’ | Enables the write cache function. |
|
|
X‘03’ | Specifies the transfer mode. Supports PIO mode 4, single word DMA mode |
| 2, and multiword DMA mode regardless of Sector Count register contents. |
|
|
X‘55’ | Disables read cache function. |
|
|
X‘66’ | Disables the reverting to |
|
|
X‘82’ | Disables the write cache function. |
|
|
X‘AA’ | Enables the read cache function. |
|
|
X‘BB’ | Specifies the transfer of |
| commands. |
|
|
X‘CC’ | Enables the reverting to |
|
|
At
At command issuance (I/O registers setting contents)
1F7H(CM) | 1 | 1 | 1 | 0 | 1 | 1 | 1 | 1 | ||
|
|
|
|
|
|
|
|
|
|
|
1F6H(DH) | × | × | × |
| DV |
|
|
| xx |
|
|
|
|
|
|
|
|
|
|
|
|
1F5H(CH) |
|
|
|
|
| xx |
|
|
| |
1F4H(CL) |
|
|
|
|
| xx |
|
|
| |
1F3H(SN) |
|
|
|
|
| xx |
|
|
| |
1F2H(SC) |
|
|
| xx or transfer mode |
|
|
| |||
1F1H(FR) |
|
|
| [See Table 5.6] |
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
At command completion (I/O registers contents to be read)
1F7H(ST) |
|
|
| Status information |
| ||
|
|
|
|
|
|
|
|
1F6H(DH) | × | × | × |
| DV |
| xx |
|
|
|
|
|
|
|
|
1F5H(CH) |
|
|
|
| xx |
| |
1F4H(CL) |
|
|
|
| xx |
| |
1F3H(SN) |
|
|
|
| xx |
| |
1F2H(SC) |
|
|
|
| xx |
| |
1F1H(ER) |
|
|
| Error information |
| ||
|
|
|
|
|
|
|
|
5 - 34 |