4.7.2Data-surface servo format
Figure 4.8 describes the physical layout of the servo frame. The three areas indicated by (1) to
(3) in Figure 4.8 are described below.
(1)Inner guard band
The head is in contact with the disk in this space when the spindle starts turning or stops, and the rotational speed of the spindle can be controlled on this cylinder area for head moving.
(2)Data area
This area is used as the user data area SA area.
(3)Outer guard band
This area is located at outer position of the user data area, and the rotational speed of the spindle can be controlled on this cylinder area for head moving.
4.7.3Servo frame format
As the servo information, the drive uses the
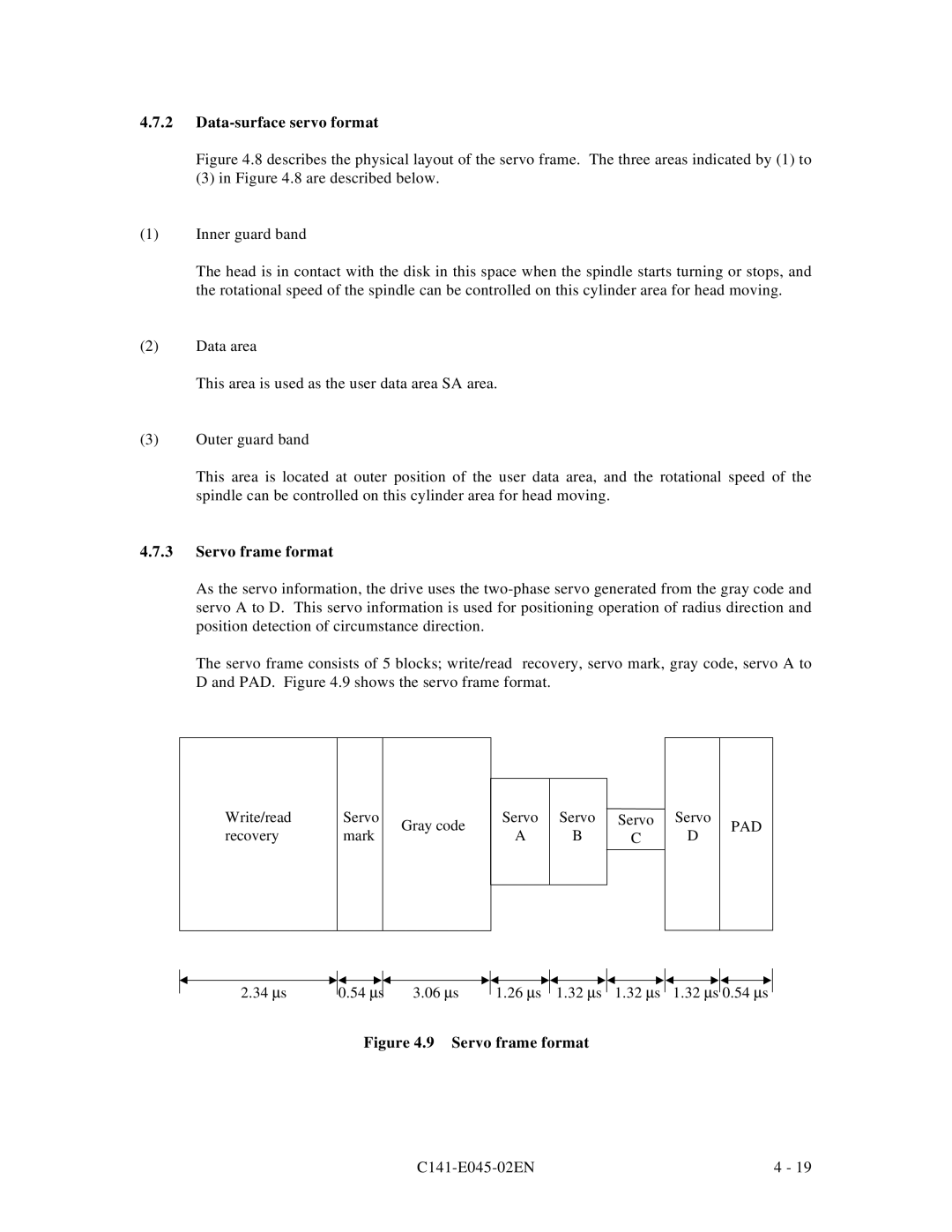
The servo frame consists of 5 blocks; write/read recovery, servo mark, gray code, servo A to D and PAD. Figure 4.9 shows the servo frame format.
Write/read recovery
Servo mark
Gray code
Servo
A
Servo
B
Servo
C
Servo
D
PAD
2.34μs
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 0.54 μs |
| 3.06 μs |
| 1.26 μs |
| 1.32 μs |
|
| 1.32 μs |
| 1.32 μs |
| 0.54 μs | ||||||||||||
|
|
|
|
|
|
| ||||||||||||||||||||
Figure 4.9 Servo frame format
4 - 19 |