525 Programmable Motion Controller
Analog Mode (Velocity or Torque)
In the Analog mode (torque or velocity) the servo amplifier responds to a conventional ±10 volt DC signal. Most variable speed drives and servo amplifiers on the market today receive commands via this type of signal.
When the DIP switches are set to enable the analog mode the display character of the 525 PMC will be an (A). In analog mode a 0 to 10 volt command signal is equated to 0 to maximum velocity or peak torque.
The 525 PMC can receive external input commands and serial commands while in analog mode. For example: When in analog mode and you initiate an index, home or jog command via an input the (A) on the diagnostic display will be replaced with an (E) and the requested motion occurs. Upon completion of the requested motion the 525's operating mode will automatically change back to analog mode (A).
You can also temporally change the operating mode by sending an SC=1 (serial command) to the 525 PMC. This would disable analog control and enable serial control displaying an (E.) on the diagnostic display at which time the 525 PMC would be able to receive motion commands via serial commands or inputs. Upon completion of the requested motion the 525's operating mode will automatically change back to analog mode (A). To change the 525's operating mode serially, use the SC=0 command.
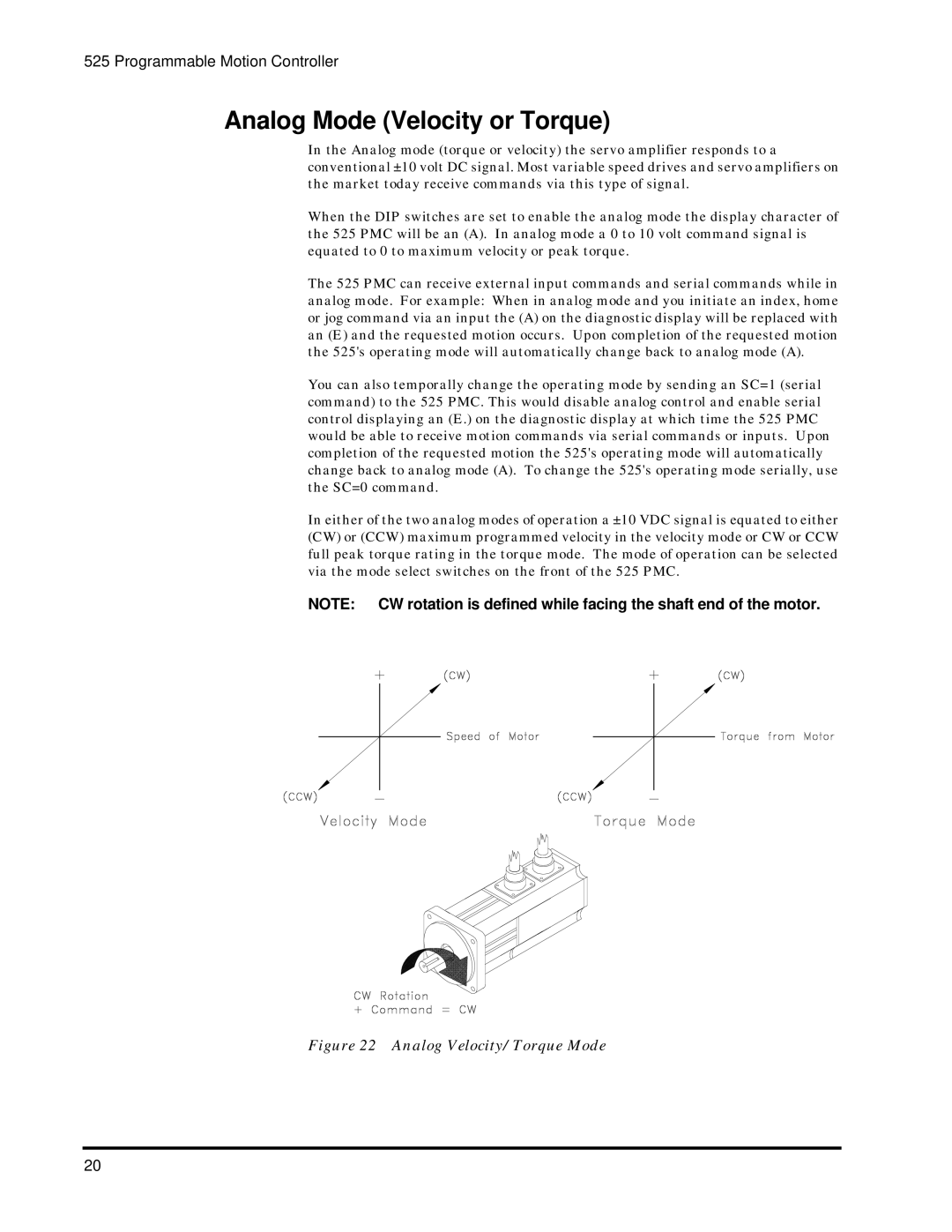
In either of the two analog modes of operation a ±10 VDC signal is equated to either (CW) or (CCW) maximum programmed velocity in the velocity mode or CW or CCW full peak torque rating in the torque mode. The mode of operation can be selected via the mode select switches on the front of the 525 PMC.
NOTE: CW rotation is defined while facing the shaft end of the motor.
Figure 22 Analog Velocity/Torque Mode
20