525 Programmable Motion Controller
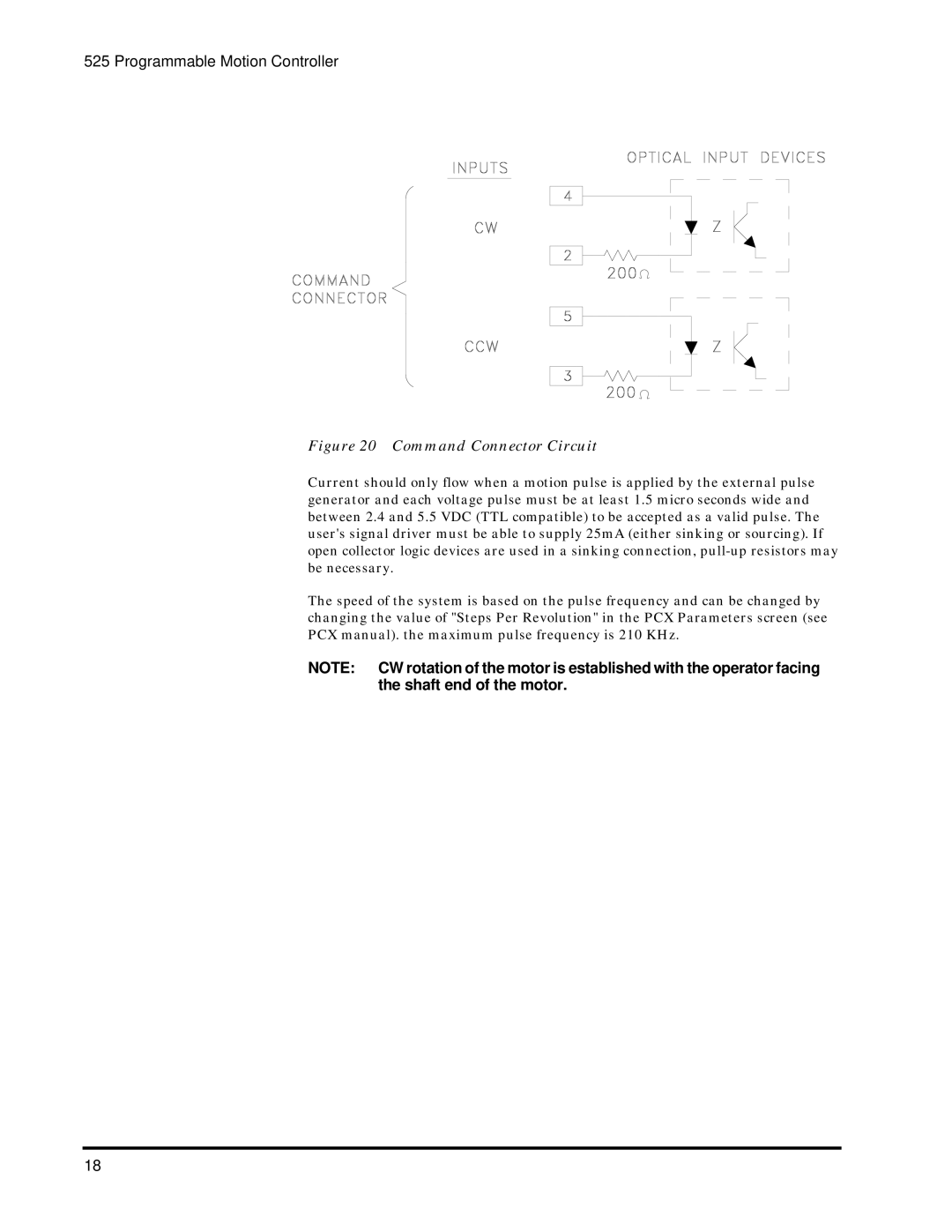
Figure 20 Command Connector Circuit
Current should only flow when a motion pulse is applied by the external pulse generator and each voltage pulse must be at least 1.5 micro seconds wide and between 2.4 and 5.5 VDC (TTL compatible) to be accepted as a valid pulse. The user's signal driver must be able to supply 25mA (either sinking or sourcing). If open collector logic devices are used in a sinking connection,
The speed of the system is based on the pulse frequency and can be changed by changing the value of "Steps Per Revolution" in the PCX Parameters screen (see PCX manual). the maximum pulse frequency is 210 KHz.
NOTE: CW rotation of the motor is established with the operator facing the shaft end of the motor.
18