Functional Block Diagram
Introduction
AN93
Table of Contents
AN93
AN93
AN93
AN93
Document Change List Contact Information
Protocols
Selection Guide
Modulations
Protocol Function Si2494/93 Si2457 Si2439/34 Si2415 Si2404
Release
Carriers and Tones
ISOmodem Capabilities
Part Numbers Package
Modem System-Side Device
Resetting the Device
Reset Sequence
Reset Strapping General Considerations
Mode Reset-Strap Pins Interface Input Clock Pin 5, RXD/MISO
SOIC-16 Reset-Strap Options
Reset-Strap Options for 16-Pin Soic Package
Reset-Strap Options for 24-Pin Tssop Package
TSSOP-24 UART-Interface Options
TSSOP-24 Parallel-Interface Options
Reset Strapping Options for QFN Parts with Uart Operation
TSSOP-24 SPI-Interface Clock-Frequency Options
Reset Strapping Options for QFN parts with SPI Operation
Input Clk
System Interface
Pin Functions vs. Interface Mode SOIC-16
Pin Functions vs. Interface Mode TSSOP-24
Pin Functions vs. Interface Mode QFN-38
Parallel-Interface Signals
UART-Interface Signals
SPI-Interface Signals
Ideal DTE Rate bps Actual DTE Rate bps Approximate Error%
DTE Rates
Flow Control
Serial Formats Detected in Autobaud Mode
Symbol Data bits Parity Stop bits
PPD
Can Monitor
U70 Bit Function
OCD
Uart Serial Interface
Parallel and SPI Interface Operation
TX Fifo
Hardware Interface Register Bit Map
Hardware Interface Register
Parallel Interface Operation
Parallel Interface Signals
Signal Function Direction
Parallel Interface Read Timing
SPI Interface Operation
Bit Function Meaning when High Meaning when Low
SPI Control-and-Address Bit Definitions
Interface Communication Modes
Wake-on-Ring Mode
Low-Power Modes
Power-Down Mode
Sleep Mode
Clkout Fsync SDI SDO Reset
SSI/Voice Mode 24-Pin Tssop and 38-Pin QFN Only
Signal Pin Number TSSOP-24 QFN-38
SSI Interface Pin Connection
Eeprom Status Register Any Other Bits are Unused
Eeprom Commands
Eeprom Interface 24-Pin Tssop and 38-Pin QFN Only
Eeprom Timing
Ecsh Eecs
Parameter Symbol Min Typ Max Unit
EOZ
Detailed Eeprom Examples
Three-Wire SPI Interface to Eeprom
Boot Commands Custom Defaults
Eeprom
Boot Command Example
AT Command Macros Customized AT Commands
Firmware Upgrades
AT Command Macro Example
Autoloading Firmware Upgrade Example
Combination Example
Command Function
Combination Example
Ascii Chart
Dec Hex Display
Hookswitch and DC Termination
DAA Line-Side Device
Ringer Impedance and Threshold
AC Termination Settings for the Si3018 Line-Side Device
AC Termination
Pulse Dialing and Spark Quenching
Typical Loop Voltage LVS Transfer Function
LVCS40 Condition
Ilim =
Loop Current Transfer Function
Legacy-Mode Line Voltage and Loop Current Measurement
Billing Tone Detection
Hardware Design Reference
Power Supply and Bias Circuitry
Hookswitch and DC Termination
Component Functions
Ringer Network
Optional Billing-Tone Filter
Symbol Value
TIP From Line Ring DAA
EMI/EMC
Schematic
Si3018/10 Schematic
Bill of Materials
Component Value Suppliers
Layout Guidelines
Reference Placement
Layout Items Required
Layout Checklist
ISOmodem Layout Check List
AN93
Motherboard Design
Module Design and Application Considerations
Module Design
Modem Module VCC and Reset Filter
Analog Output
Audio Filter Response
Audio Quality
Modem Reference Guide
Controller
Command Action
AT Command Set
Configuration Status
DSP
Command Result Comment
Command Examples
Multiple AT Commands on a Single Line
Command Result
Basic AT Command Set
Consecutive U-Register Writes on a Single Line
Modifier
Enable
No Patch AT Command Chip Revision
ATI0 ATI1
Revision C Patch rcpXYYYY
AT Command Chip Revision
Revision B Patch rbpXYYYY
ATI0
Enable result codes See Table
Speaker is always off
Command Action Verbal result codes
Program RAM write this command is used to upload firmware
+DRNONE
Disabled
+DR=X
+DRV42B RD
Specifies the mode of operation when answer a modem
Specifies the mode of operation when initiating a modem
Connection = Disable synchronous access mode
C,D
Specifies action taken if an underrun condition occurs
= CRC generation checking disable
= Nrzi encoding and decoding disabled
During transparent sub-mode
Class 1 Transmit Carrier
United States default
Country
Automatically detect the baud rate
+GCI?
Fixed DTE Rate
BPS
ITU-T V.34 default for Si2434
V22B ITU-T V.22bis default for Si2404
V32B ITU-T V.32bis default for Si2415
ITU-T V.90 default for Si2457
+PMHT=X
Enable Short Phase 1 and Short Phase
+PMHR=X
+PQC=X
= Off
DCEs decide to use short startup procedures
= After ring only
Distinctive Ring
DTE/DCE Inactivity Timer
Command Action Transmit Gain Selection
Load Voice Factory Defaults
ISOmodem on-hook. Aout disabled. Tone detec
OK result code. Default time is 0 seconds
Ringing Tone Goes Away Timer
Ringing Tone Never Appeared Timer
Is five seconds
Voice Compression Method
Speakerphone AEC, AES and LEC disabled
Dtmf / Tone Duration Timer
Signed PCM
Kbps max default for Si2415
Extended AT Commands
Extended AT& Command Set
Kbps max default for Si2457 transmit and Si2434
Only 56 kbps to 28 kbps
TIP +
ISOmodem answers a call in answer mode
Extended AT% Command Set
Enable V.42bis in transmit and receive paths
Disable automatic line-in-use detection
Extended AT\ Command Set
Mode is not allowed with a parallel or SPI interface
\P0 Even
\Q2 Use CTS only
\V0 Report connect and protocol message
\T9 Kbps4
\T16 Autobaud On4
Result Codes
Numeric1 Meaning Verbal Response
No Polarity Reversal
Stas
Polarity Reversal
Protocol None
ALTERNATE, +CLASS
UN-OBTAINABLE Number
Disconnect Codes
Disconnect Code Reason
Register Descriptions
Definition Register Function Default Range Units Decimal
Registers
Ascii
All spaces 0s
2400 Symbols/second
Symbol Rate Allowable Data Rates
Register Address Name Description Default Hex
DT4B1
U0F
DT4A0
DT4B2
U2F
U2E
Bmtt
Bdlt
U4F
U4E
Prdd
FHT
Sasf
V9AGG
Samco
SC0
Bit-Mapped U-Register Summary
Register Summary
2. U00-U16 Dial Tone Detect Filter Registers
Register Name Description Default
U0-U16 Dial Tone Registers
U17-U30 Busy Tone Detect Registers
3. U17-U30 Busy Tone Detect Filter Registers
300/480
310/510 Default Busy and Dial Tone
BPF Biquad Stage Output Scalar
320/630
BPF Biquad Values
400/440
4. U31-U33 Ringback Cadence Registers
Ringback Cadence Registers
Dial Tone Timing Register
5. U34-U35 Dial Tone Timing Register
7. U46-U48 Dtmf Dial Registers
Pulse Dial Registers
Dtmf Dial Registers
9. U4D Modem Control Register 1-MOD1
Ring Detect Registers
8. U49-U4C Ring Detect Registers
Register U4D Bit Map
Loop Current Debounce Registers
Pre-Dial Delay Timer Register
Flash Hook Time Register
Transmit Level Register
U62 Bit Map
U53 Bit Map
U54 Bit Map
U63 Bit Map
U65 Bit Map
PDL
Line-Side Chip Power Down
17. U67-U6A International Configuration Registers
= Normal operation
U66 Bit Map
U67 Bit Map
U68 Bit Map
18. U6C Line-Voltage Status Register
U6A Bit Map
U6C Bit Map
19. U6E-U7D Modem Control and Interface Registers
Ptmr
U6E Bit Map
U6F Bit Map
U70 Bit Map
U71 IO1 Bit D15 D14 D13 D12 D11 D10 Name
Type Reset settings = Bit
Disables PCM mode Enables PCM mode
Function 155 Reserved Read returns zero
U76 Bit Map
U77 Bit Map
U79 Bit Map
Monitor Mode Values
U78 Bit Map
Adaptive Dialing
U7A Bit Map
= Normal Atdtw operation
Pin indicates valid ring signal
Synchronous Mode
= Normal asynchronous mode
Given time
= ATZ enabled
= Disables No Loop Current Detect
= Timed calibration disabled
20. U80 Transmit Delay for V.22 Fast Connect
Minimal Transparency
Special Error Reporting Mode
= Ignore unrecognized in-band commands
Framed Sub-Mode Startup
Firmware Upgrades
Load Technique and Speed Table
Patch, 115 kbaud Uart Lines Reset, then
Escape Methods
Method
Escape Pin Escape
1. +++ Escape
Th Bit Escape
Enabling Error Correction/Data Compression
Error Correction
Wire Mode
To Enable Use AT Commands
Synchronous Mode Overview
Legacy Synchronous DCE Mode/V.80 Synchronous Access Mode
15. V.80 Mode
Epos Electronic Point of Sale Applications
Synchronous Access Mode Settings
AT\N0
CRC
Command Hex Supported Transmit Direction Receive Direction
Indicator pair Code Transparent Submode
EM In-Band Commands and Statuses
Supported Transmit Direction Receive Direction
Fast Connect Settings
Command
Code Transparent Submode
ATDT12345 Connect 1200 Protocol None
0x190x190x110x11
Programming Examples
Modem Feature vs. Hardware, AT Command and Register Setting
Function/Feature AT Commands Registers
Quick Reference
DC Termination
Country-Dependent Setup
DC Termination Control Bits
Reg Bit Val Function
Country Initialization Table
Country Configuration
Country Initialization Table
Country Initialization
AT+GCI=16
AT+GCI=A
AT+GCI=F
AT+GCI=9C
AT+GCI=31
AT+GCI=26
AT+GCI=27
AT+GCI=6C
AT+GCI=42
AT+GCI=3C
AT+GCI=3D
AT+GCI=57
AT+GCI=46
AT+GCI=53
AT+GCI=58
AT+GCI=61
AT+GCI=59
AT+GCI=0
AT+GCI=9F
AT+GCI=69
AT+GCI=7B
AT+GCI=89
AT+GCI=7E
AT+GCI=82
AT+GCI=87
AT+GCI=B8
AT+GCI=A0
AT+GCI=FE
AT+GCI=A5
AT+GCI=A6
UAE
AT+GCI=B4
International Call Progress Registers
Dial Registers
Line Interface/Control Registers
Blacklisting
AT Command Function
Special Requirements for Serbia and Montenegro
S42 Blacklisting
Caller ID
Caller ID Modes
Japan Caller ID
SMS Commands
SMS Support
Protocol
150
Character Description Hexadecimal Value Ascii Value
Type II Caller ID/SAS Detection
Mdmf Parameters
Johndoe
SAS Tone Frequency
SAS Cadence for Supported Countries
Australia
Country Tone Frequency Hz Cadence seconds Registers
Aruba
Austria
Cyprus
Country Tone Frequency Hz Cadence seconds Registers China
Croatia
Czech Republic
Honduras
Greece
Guyana
Hong Kong
064 0.436
Israel
Japan
Jordan
Lao P.D.R
Kiribati
Korea Republic
Lithuania
Papua New Guinea
Nigeria
Oman
Paraguay
St. Lucia
Country Tone Frequency Hz Cadence seconds Registers Russia
St.-Kitts-and-Nevis
Saudi Arabia
Trinidad
Sweden
Tajikistan
Tobago
Line Not Present/In Use Indication Method 1-Fixed
Intrusion/Parallel Phone Detection
On-Hook Condition
Loop Voltage Action
Line Not Present/In Use Indication Method 2-Adaptive
Off-Hook Condition
ATH1
Intrusion Detection
Register Bits Name Function
Initiating Modem-On-Hold
Possible Responses to Pmhr Command from Remote Modem
Modem-On-Hold
Value Description
Hdlc Bit Errors on a Noisy Line
Receiving Modem-On-Hold Requests
Beginning of Packet
Bit Errors
DCE
Bit Errors
Data Meaning
0D 0A 4E 4F 20 43 52 49 45 52 0D 0A
Overcurrent Detection
Overcurrent Detection
Pulse/Tone Dial Decision
Register Bit Value Function
Automatic Phone Line Configuration
12. V.92 Quick Connect
Telephone Voting Mode
Possible +PMHT Settings
AT+PQC Parameters
AT+PSS Parameters
Software Reference
Extended AT+ Command Set
Handset, TAM, and Speakerphone Operation
After ring only
Command Action Caller ID Type
Caller ID Enable
Distinctive Ring Cadence Reporting
Command Action Analog Source / Destination Selection
+VTS command. Default time is 1 second dur =
Command Action Ringing Tone Never Appeared Timer
Speakerphone AEC, AES and LEC disabled. Handset FIR filter
Compression Selection Method
Command Action Dtmf and Tone Generation
Transmit Voice Stream
Code Hex Simple Action Command Description
DLE Commands DTE-to-DCE
DLE Commands DTE-to-DCE
Format DLECode
Code Hex Description
DLE Simple Events DCE-to-DTE
DLE Events DCE-to-DTE Simple Event Reporting
SUB
180
Complex Event Reporting
Voice Mode U Registers Address
Description Default
Format DLEXResponseDLE Description
Voice Mode U Registers
Register Address Name Description Default
HRXFIR3
HRXFIR1
HRXFIR2
HRXFIR4
STXFIR3
STXFIR1
STXFIR2
STXFIR4
SRXFIR3
SRXFIR1
SRXFIR2
SRXFIR4
U19E
U199 Bit Definitions
Voice Reference-Overview
TAM, Handset, and Speakerphone Voice Paths
Rev 189
Voice Mode Operations +FCLASS=8
+VTX +VRX +VSP +VTS
DTR off &D2
Input Current Modem Settings Command or
Event +VNH = ATH or
ATZ or
Si3000 Configuration
System Voice Modes
TAM Pstn
Initialization
Initialization Sequence
Rev 195
Overview
Handset Configuration
Handset
AT+VSP=0
AT+VLS=0
AT+VLS=13
Handset Automatic Pulse Dial
Handset Automatic Tone Dial
Handset Manual Off-Hook Dial
AT+VLS=14
Handset to TAM Hands-Free Transition
Terminate
AT+VSP=1
Handset to Speakerphone Transition
Speakerphone Transition
NAME=JONES Jennifer
Telephone Answering Machine
Local Ring Notification with Type I CID Event
ATU199&FFFD
TAM Hands-Free Record OGM
Record OGM
AT+VRX Connect
Record Local ICM
TAM Hands-Free Review OGM
Review OGM
Review ICM
TAM Handset Record OGM
Trigger receive operation. The first byte
TAM Handset Review OGM
AT+VSM=4
TAM Pstn Normal Answer OGM Playback with ICM Record
Normal Answer OGM Playback with ICM Record
AT+VLS=15
ICM
Interrupted Answer OGM Playback with Dtmf Menu Entry
DLE1 Dtmf 1 digit detected
Speakerphone
Simplex Speakerphone
Simplex Speakerphone U Registers
Register Name Description Default Value
Transmit Gain Calibration-Speakerphone Disabled
External Microphone/Speaker Calibration
Transmit Gain Configuration
Transmit/Receive Gain Calibration Dial Remote Telephone
AT+FCLASS=8
Receive Gain Configuration
Receive Gain Reference Measurements
Speakerphone Calibration-AEC Gain Calibration
Reg Name Bit U19E
AEC Gain Calibration Dial Remote Telephone
Speakerphone Configuration
Speakerphone Configuration
Simplex Speakerphone Configuration
Speakerphone Manual Off-Hook Dial
Simplex Speakerphone Configuration
Speakerphone Automatic Tone Dial
Call-Automatic Tone Dial
Call-Automatic Pulse Dial
Speakerphone Automatic Pulse Dial
Speakerphone to Handset Transition
Termination
Glossary
References
Security Protocols
Implementing the SIA Protocol
Considerations when Disconnecting the Session
AT+F0
AT+F3
AT+F1
AT+F2
AT+F4
Result Code Meaning Remarks
Implementing the Ademco Contact ID Protocol
Modem Specific Implementation Details
Ademco Contact ID Protocol Tone Transmission AT Commands
Dtmf Digit Low Tone Hz High Tone Hz Contact ID AT Command
Kissoff
Handshake Tone Detection
Ademco Mode of Operation
Step DTE-to-Modem Command Modem-to-DTE Remarks Indication
Event Modem-to-DTE indication Remarks
Message
Delay 250 ms before transmitting Data Tones
Wait for Receiver to answer with handshake tones
Wait for Kissoff tone
ATH
Rev 233
Chinese ePOS SMS
SMS Message Format
AT Command ISOmodem Response Description
SMS AT Command Set
AT Commands for SMS
+FCLASS=256
User Registers for SMS Operations
Register Bits Name Description Default Hex
= Auto Mode
SMS User Registers
Crlfconnect Crlf
Procedure
Example
Connect 1CRLF
Response
Dleetxcrlfno Carriercrlf
Connect 2CRLF
Example Session
Dleetxcrlfokcrlf
POS
SMS Process in Host and Modem
Testing and Diagnostics
Prototype Bring-Up Si3018/10
Register Configurations
Inappropriate Commands
Command Timing
Host Interface Troubleshooting
Component Troubleshooting
Isolation Capacitor Troubleshooting
10.1.6. Si3018/10 Troubleshooting
Connect Evaluation Board to Prototype System
Test the Host Interface
EVB
Test the Prototype Si3018/10 Circuitry
Si3018/10 Typical Voltages Resistance to Si3018/10 Pin
Si3018/10 Resistance
FB1 FB2 RV1
Resistance across Components
Voltages across Components with Diode Checker
Component Voltage
Self Test
Loop Test Circuit
Board Test
Bell 103-V.34 Modem Functional Test Connection
Modem Under Test
Teltone ILS
Isdn Modem
Test Coverage
AT Command/Test Method Desired Response
Compliance Testing
AT Commands for Compliance Testing
29 Data Rate
Symbol/Data Rate
S41 Symbol Rate Allowable Data Rates
Transmit Modulation Data Rate
Safety
Surges
AM-Band Interference
Published Coilcraft TRF-RJ11 Filter Performance
Debugging the DTE interface
Debugging the DTE Interface
Appendix A-EPOS Applications
Modulation
Recommendation
0xFF 0x19 0xA0 0x19 0xB1
ISOmodem in Epos Applications
ISOmodem V.80 Protocol Hdlc Framing in Framed Sub-Mode
AT&D2
Setup procedure
29 FastPOS Sample Program
AT+FCLASS=1
How to use the program
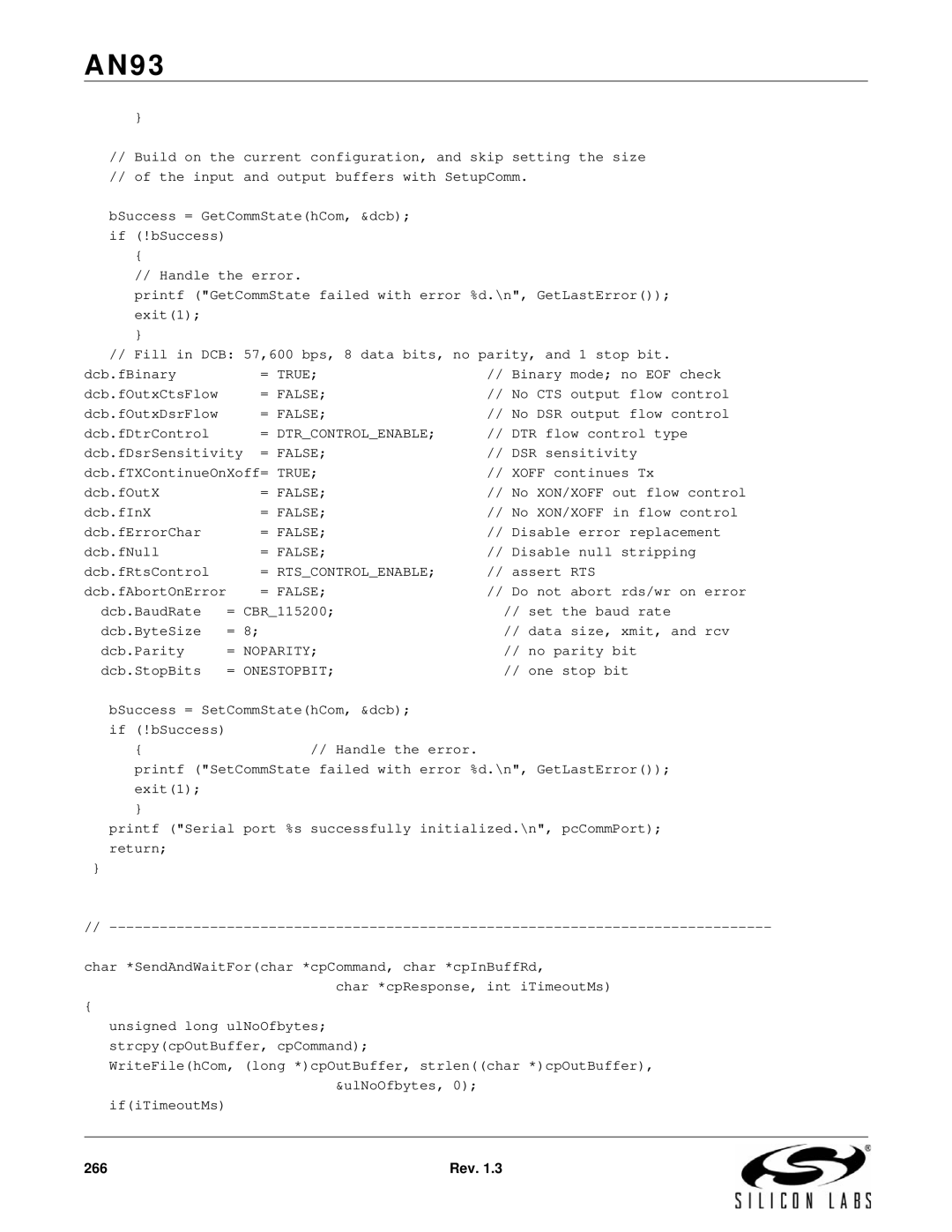
Example Program in C/C++
Rev 263
264
Rev 265
True
Rev 267
= Rtscontrolenable
Rev 269
270
RTS not RTS signal
FastPOS Detailed Wave Files
FastPOS DTE Trace
Hardware Setup
When to Use Audio Recording
Times When Audio Recording May Not Help
Setting PC Microphone Input for Recording Windows NT
Larger of the two jacks 3.5 mm carries audio to the PC
Setting PC Microphone Input for Recording Windows
Sounds and Multimedia Properties
Setting PC Microphone Input for Recording Windows XP
Multimedia Properties
Sounds and Audio Devices Properties
Making the Recording with Adobe Audition or WaveSurfer
Sound Recorder
Audio Playback and Analysis
Adobe Audition Temporal View of a Good V.22 Transaction
Adobe Audition Spectral View of a Good V.22 Transaction
Band Spectral Display
Audio-Recording Pitfalls
Recording Made at Excessive Level
Details of Some Low-Speed Protocols
Appearance of Bell 212 Protocol
Appearance of V.22 bis Protocol
Appearance of V.29 FastPOS Protocol
Examples of Epos Server Misbehavior
Example of Epos Server Misbehavior
Examples of Line Impairments
Dtmf Distorted by Low Line Level
Power Line Related Noise
Appendix C-PARALLEL/SPI Interface Software Implementation
MCU
Software Description
Hardware Access Layer
Interrupt Service and Polling Layer
MCUhardware.c modemhardware.c
RXF Interrupt Receive Fifo Almost Full
Interrupt Service Routine ISR Method
Polling HIR1 Method
U70 Interrupt
Timer Interrupt Receive Fifo Not Empty
TXE Interrupt Transmit Fifo Almost Empty
Parallel- or SPI-Port Interrupt-Service Flowchart
Buffer Management, Status and Control Layer
Buffer Management
Circular-Buffer Flowchart
Application Layer Sample Application
Status and Control
Making a Connection
Compiler Option Dot Commands
Modem Operation
Data Bursts
Modem Interrupt Service Sample Code
Sfrpagesave = Sfrpage
Rev 301
302
Revision 0.7 to Revision
Revision 0.5 to Revision
Revision 0.6 to Revision
Revision 0.8 to Revision
Contact Information