www.baldormotion.com
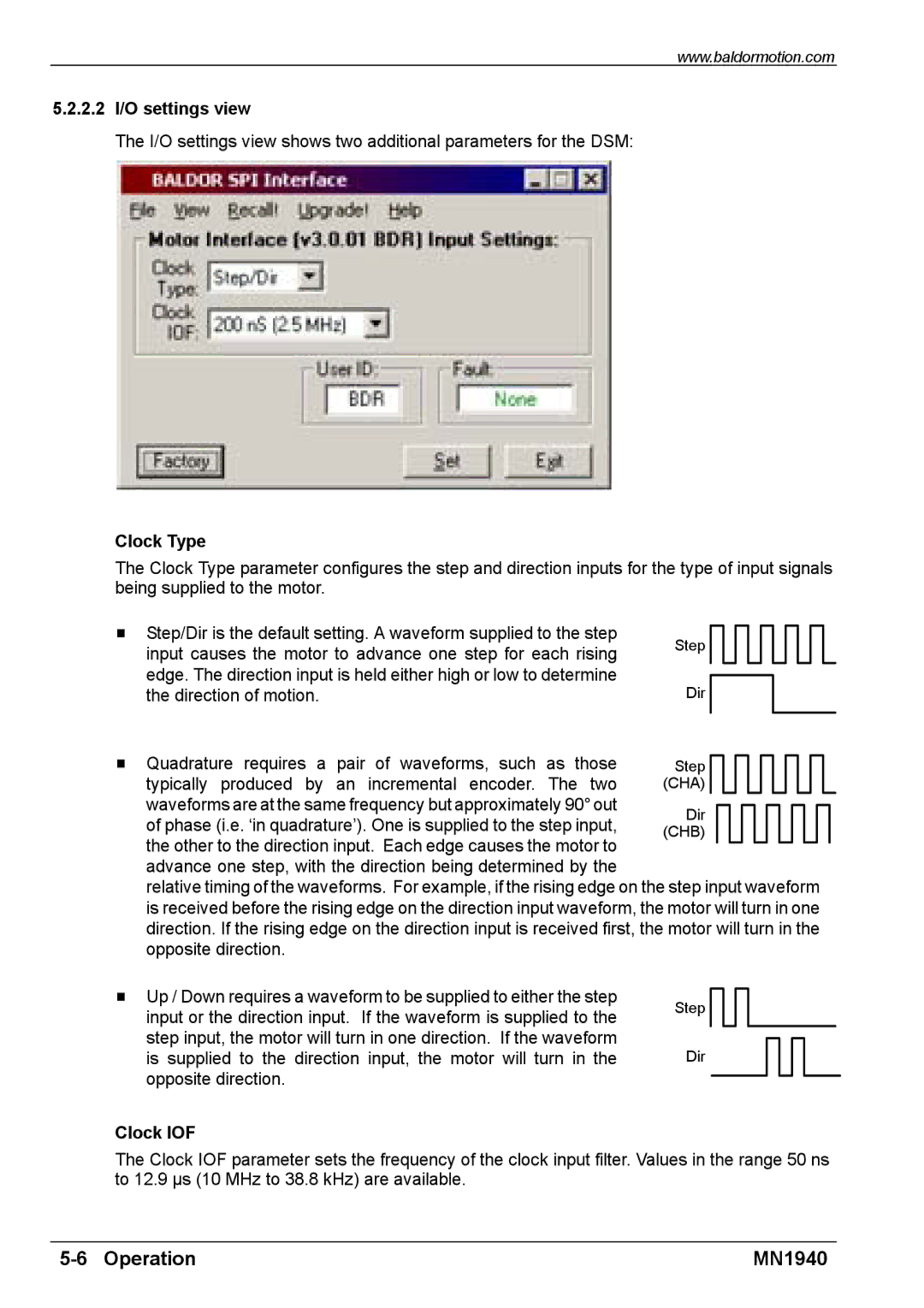
5.2.2.2I/O settings view
The I/O settings view shows two additional parameters for the DSM:
Clock Type
The Clock Type parameter configures the step and direction inputs for the type of input signals being supplied to the motor.
H Step/Dir is the default setting. A waveform supplied to the step | Step | |
input causes the motor to advance one step for each rising | ||
| ||
edge. The direction input is held either high or low to determine | Dir | |
the direction of motion. |
H Quadrature requires a pair of waveforms, such as those typically produced by an incremental encoder. The two waveforms are at the same frequency but approximately 90° out of phase (i.e. ‘in quadrature’). One is supplied to the step input, the other to the direction input. Each edge causes the motor to advance one step, with the direction being determined by the
relative timing of the waveforms. For example, if the rising edge on the step input waveform is received before the rising edge on the direction input waveform, the motor will turn in one direction. If the rising edge on the direction input is received first, the motor will turn in the opposite direction.
HUp / Down requires a waveform to be supplied to either the step input or the direction input. If the waveform is supplied to the step input, the motor will turn in one direction. If the waveform is supplied to the direction input, the motor will turn in the opposite direction.
Clock IOF
Step
Dir
The Clock IOF parameter sets the frequency of the clock input filter. Values in the range 50 ns to 12.9 μs (10 MHz to 38.8 kHz) are available.
MN1940 |