Specifications
Drive Specifications
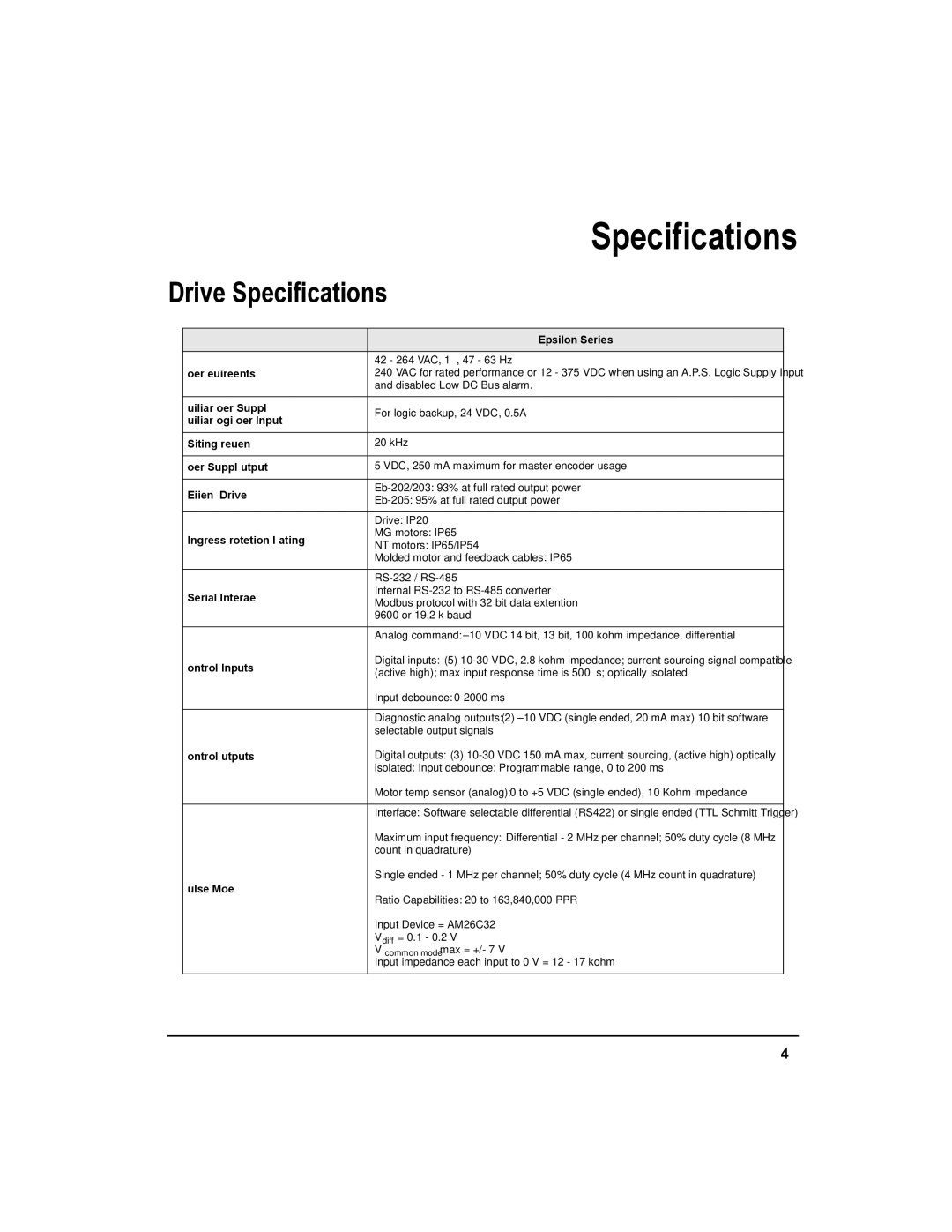
| Epsilon Series | |
| 42 - 264 VAC, 1 Ø, 47 - 63 Hz | |
Power Requirements | 240 VAC for rated performance or 12 - 375 VDC when using an A.P.S. Logic Supply Input | |
| and disabled Low DC Bus alarm. | |
|
| |
Auxiliary Power Supply/ | For logic backup, 24 VDC, 0.5A | |
Auxiliary Logic Power Input | ||
| ||
|
| |
Switching Frequency | 20 kHz | |
|
| |
Power Supply Output | 5 VDC, 250 mA maximum for master encoder usage | |
|
| |
Efficiency - Drive | ||
| ||
|
| |
| Drive: IP20 | |
Ingress Protection (IP) Rating | MG motors: IP65 | |
NT motors: IP65/IP54 | ||
| Molded motor and feedback cables: IP65 | |
|
| |
| ||
Serial Interface | Internal | |
Modbus protocol with 32 bit data extention | ||
| 9600 or 19.2 k baud | |
|
| |
| Analog command: ±10 VDC 14 bit, 13 bit, 100 kohm impedance, differential | |
Control Inputs | Digital inputs: (5) | |
(active high); max input response time is 500 µs; optically isolated | ||
| ||
| Input debounce: | |
|
| |
| Diagnostic analog outputs: (2) ±10 VDC (single ended, 20 mA max) 10 bit software | |
| selectable output signals | |
Control Outputs | Digital outputs: (3) | |
| isolated: Input debounce: Programmable range, 0 to 200 ms | |
| Motor temp sensor (analog): 0 to +5 VDC (single ended), 10 Kohm impedance | |
|
| |
| Interface: Software selectable differential (RS422) or single ended (TTL Schmitt Trigger) | |
| Maximum input frequency: Differential - 2 MHz per channel; 50% duty cycle (8 MHz | |
| count in quadrature) | |
Pulse Mode | Single ended - 1 MHz per channel; 50% duty cycle (4 MHz count in quadrature) | |
Ratio Capabilities: 20 to 163,840,000 PPR | ||
| ||
| Input Device = AM26C32 | |
| Vdiff = 0.1 - 0.2 V | |
| V common mode max = +/- 7 V | |
| Input impedance each input to 0 V = 12 - 17 kohm | |
|
|
47