INMARSAT-C Mobile Earth Station
V 9 9
Safety Instructions
Antenna Unit
Contents
System Initialization
INMARSAT-C Communications
Transmitting message stored on floppy disk multiple address
AP-11
International Telex/Telephone Country Code List
AP-10
AP-12
Vii
Numerals in parenthesis are page numbers
Operational Overview
Viii
Program Number
This page is intentionally left blank
Foreword
Introduction
Features
About This Manual
Felcom 12 System Configuration
Felcom 12 system configuration
INMARSAT-C System
Inmarsat System Configuration
Inmarsat-C satellite communication system
Inmarsat system satellites
Coverage area of satellites
Communications Network
Types of MES
Distress Alert Unit IC-302
Peripheral Equipment
Distress/Urgent Receiving Unit IC-303
Distress Message Controller DMC-5Option
This page is intentionally left blank
Self test
When the audible alarm sounds
Communication Unit
This chapter provides an overview of the Felcom 12 system
Floppy disk drive
Terminal Unit
Floppy disk
Printer PP-510 optional supply
Printer PP-510
Keyboard
Key description Esc
Selects upper or lower case letters. Press
Appears on the display when the keyboard
Cannot enter alphabet when the Num LED
Hold down the key to get upper case letters
Felcom 12 provides the keyboard shortcuts shown below for
Function Menus
Shortcut key operation
Commonly used functions
Selecting menu, menu options
Function menu description
Press F6 to display the Logs menu
Sample menu operation
Press 1 to display the send message log
Display Indications
Communication network mode
Distress alert information
Frame synchronization
Communication unit status
Communication unit remarks and DCE version number
Ocean region receiving
Other information
Error Messages and Alerts
Logging status
Date and time display
Press F8 to display the Setup menu
Silencing the Audible Alarm
Silencing the alarm by the Setup menu
OFF
Sync NCS
NCS IOR Logout
Contents of program disk
System Settings
Two sets of DTEs installed
Press 2 to display the System Setup screen
System setup
Press Enter to open the date window
DTE1IOR
YY-MM-DD
DTE1POR
Offegc
INT
EXT DTE1
DTE1 ALL
IOR INMARSAT-C DTE1 OFF
DTE2 PC/DATA Auto
Terminal Setup
Press Esc to open the update window
Login and Logout
Press 1 to display the Login screen
Login
Press Enter to start login
LAT
Logout
Calling NCS IOR
LON
NCS IOR Login LAT
Calling NCS IOR Logout LAT
EGC Settings
What is the EGC Enhanced Group Call service?
Press 5 to display the EGC Setup screen
EGC setup
OFF Navtex
22 EGC setup screen, Navarea window
Press Enter to open the Waypoint window
Offon Navtex OFF
26 EGC setup screen, update window
Programming EGC channels
Press Enter to open the text window
Programming NCS Channels
Select Yes and press Enter to register input
AOR West AOR East POR IOR
Press Enter to register input Press Esc
Freq
Programming the LES list
LES List Operations
Press 2 to display the LES List
Fucino
Southbury Goonhilly
Southbury
Kumsan IOR
LES ID
Deleting and changing the LES list
Printing the LES list
USA
LES IDs
Operate / to place the cursor on a blank line Press Enter
Station List Operations
Programming the station list
Telex
Csdn Psdn
Press Enter to open the destination type window
Telex FAX
Dnid Spec
Prefix Code Function
Printing the station list
Editing the station list
Press F8, 9 and 1 to display the Station List
Press Enter to open the window for latitude entry
Entering Own Ship’s Position
LAT LON
Coieki
Setting Directories
ABC DIR
Comtest
AOR.W AOR.E POR IOR
Mail Service List
Press 5 to display the E-mail Service List
EIK
53 Service station list
Mail Setup
AOR.W AOR.E POR
Press Enter to the update window
This page is intentionally left blank
Preparing a routine message
Preparing a Message
Press F1 to display the File menu
Preparing a confidential message
Explanation of addressee code and password
Cursor is on the first line. Type your message
Editor menu setup
NCS POR Logout
Cutting and pasting text
Press F2 to select the Edit menu
Copying and pasting text
Select the text you want to copy
Search and Replace
Insert with Citation
Select All
Go to line
Formatting a floppy disk
Saving a Message
Select media type Press Enter
Press Enter. Saving appears on display
Saving a message
Save message, retain place on screen
\SEIZOU
\SEIZOUSE
Save message, clear screen
Enter a file name Press Enter
Felcom
Opening a File
Opening a file
Switching between files
Opening a file where a working area is occupied
Saving a File Under a New Name
23 Save screen, prompt for saving a message before closing
Printing a File
Deleting a File
Combining Files
Coieki Comtest
Press Enter to delete the file, or press Enter to escape
Mime Multipurpose Internet Mail Extensions
Press Enter. The prompt OK to delete file? appears
Select the file you want to decode Press Enter
Do the following to change file name Press F1
Rename
Select a file you want to rename Press Enter
Transmitting
Code description
Transmitting prepared message
Common procedure for transmitting a message
UNTITLED1 Ascii
Press Enter to close selection window
Transmit message menu, country/ocean code window
Transmit message menu, station ID window opened
Press Enter to open the window for address entry
Inet Santa Paula Transmit
Procedure for transmitting a message con’t from
Select LES ID Press Enter to close the selection window
11 Transmit message menu, option window opened
IA5
Transmit Message Status
Transmitting message stored on floppy disk multiple address
NCS IOR Logout LAT
DEG LES ID Yamaguchi
DEG KTS Transmit
JJJ
Furuno
Frninmbtsts Telex
LES ID DEG
Frninmbtsts
Arvi
Japan EIK
Norway Thermopylae
India Kumsan
NCS POR Login
Canceling transmission
Santa Paul
Felcom Fusa
Press Enter to open the Cancel window
Confirming delivery status message status list
NCS POR
Message status list description
Manually requesting delivery status
24 Request delivery status display
2-digit code services
26 Transmit message menu
For maritime safety service
For general utility
Inserting the destinations of a fax terminal
27 Transmit message menu, FAX selected
Receiving
When a message is received
Received alarm
Registration
Printing
Setting the receive alarm
Display log
Saving and filing
Displaying receive messages
Printing receive messages
Screen can be scrolled with the up and down arrow keys
Automatically saving receive messages
Press F8 Press 6 to display Auto Mode Setup menu
Saving receive messages to a floppy disk
Press F6 Press 2 to display the Receive Message Log
Deleting receive messages
Press F6 Press 2 to display list of receive messages
Displaying and printing the display log
Display Log
Distress/Urgent Receiving Call Unit IC-303
Press F6 Press 4 to display the Display Log
Automatic printing of display log
Displaying and reprinting EGC messages
EGC Messages
Display send message log or receive message log
Press F6 Press 3. The Display EGC Message screen appears
Displaying EGC closed network ID Enid
40 EGC network ID list
Receiving EGC distress or urgent message
TX message is printed when the message result is Success
Tx Message Example Printout
Confirmation OFF
Confirmation on
Delivery Confirmed
This page intentionally left blank
Data Reporting
Setting a data report
Press F5 to display the Position Reports menu
Data report menu
Dnid LES ID
Select Yes Press Enter to close the Data Report window
Setting a message report
NAV+SEA INF
Page
Polling
Polling command
Polling command on MES signalling channel
Select Yes Press Enter to finish
Other polling command
Polling reception
Sample MES message channel printout
Displaying Dnid
Press F8, 6 to display the Auto Print Mode Setup screen
Dnid Data Network Identification
Dnid LES
11 Sample MES signalling channel printout
Enabling/Disabling Dnid
Distress Alert
Preparing a Distress Alert
Distress Alert setup, requesting confirmation of settings
Press Enter to register data you’ve just entered
Transmitting a Distress Alert
Distress Alert Unit IC-302
Testing Distress Button
Test Menu
Mayday Mayday Mayday Name is
Distress Communications
Need Help
Press Enter to transmit the distress message to the LES
Search and Rescue
Aborting an Operation
Press 3 to select Abort
Scanning NCS
Press Enter to start the scanning
NCS CC
Selecting EGC Receiving Channel
Bber
Selecting NCS Channel
AOR West AOR East POR IOR Freq
Maintenance
Safety Information
Checking connectors and earth terminal
General Checking and Maintenance
Cleaning the terminal unit and communication unit
When the power can’t be turned on power lamp does not light
Testing the communication unit through the keyboard
Self test at power application communication unit
Self Tests
ROM OK RAM OK DP-RAM OK
Performance Verification PV Test
PV test sequence
ROM OK RAM1 OK RAM2 OK Eeprom OK GPS OK DP-RAM OK
PV test procedure
Press Enter to transmit the PV test request to NCS
Interpreting the PV tests results display
Results of PV test
Date and time of test
System Status Monitor
Interpreting the system status monitor
Tidal current direction
Replacing Internal Battery
Water temperature
Tidal current speed
Error Messages
Error message Meaning Action
PV Test
Dnid
Error message Meaning Action
This page is intentionally left blank
Specifications
SP-1
SP-2
IC-112 & IC-212 Receiving 25W, Transmitting 120W
International Telex/Telephone Country Code List
AP-1
AP-2
AP-3
AP-4
NTT
AP-5
AP-6
AP-7
Area and Country Telephone Telex Country Country Code
AP-8
International Telex Abbreviations
AP-9
Glossary of Acronyms
AP-10
International Telegraphy Alphabet
AP-11
AP-12
AP-13
AP-14
LES IDs List
AP-15
Output sentences
Digital Interface IEC
Input sentences
Transmission interval
Load requirements
Schematic diagrams
NAV in port listener
Isolation Optocoupler Input Impedance 486ohm Max. Voltage ±
AP-18
Data sentences
Input sentences BWC Bearing and distance to waypoint
BWR Bearing and distance to waypoint -rhumb line
AP-19
DBT Depth below transducer
AP-20
GGA Global positioning system GPS fix data
AP-21
MTW Water temperature
GLL Geographic position latitude and longitude
AP-22
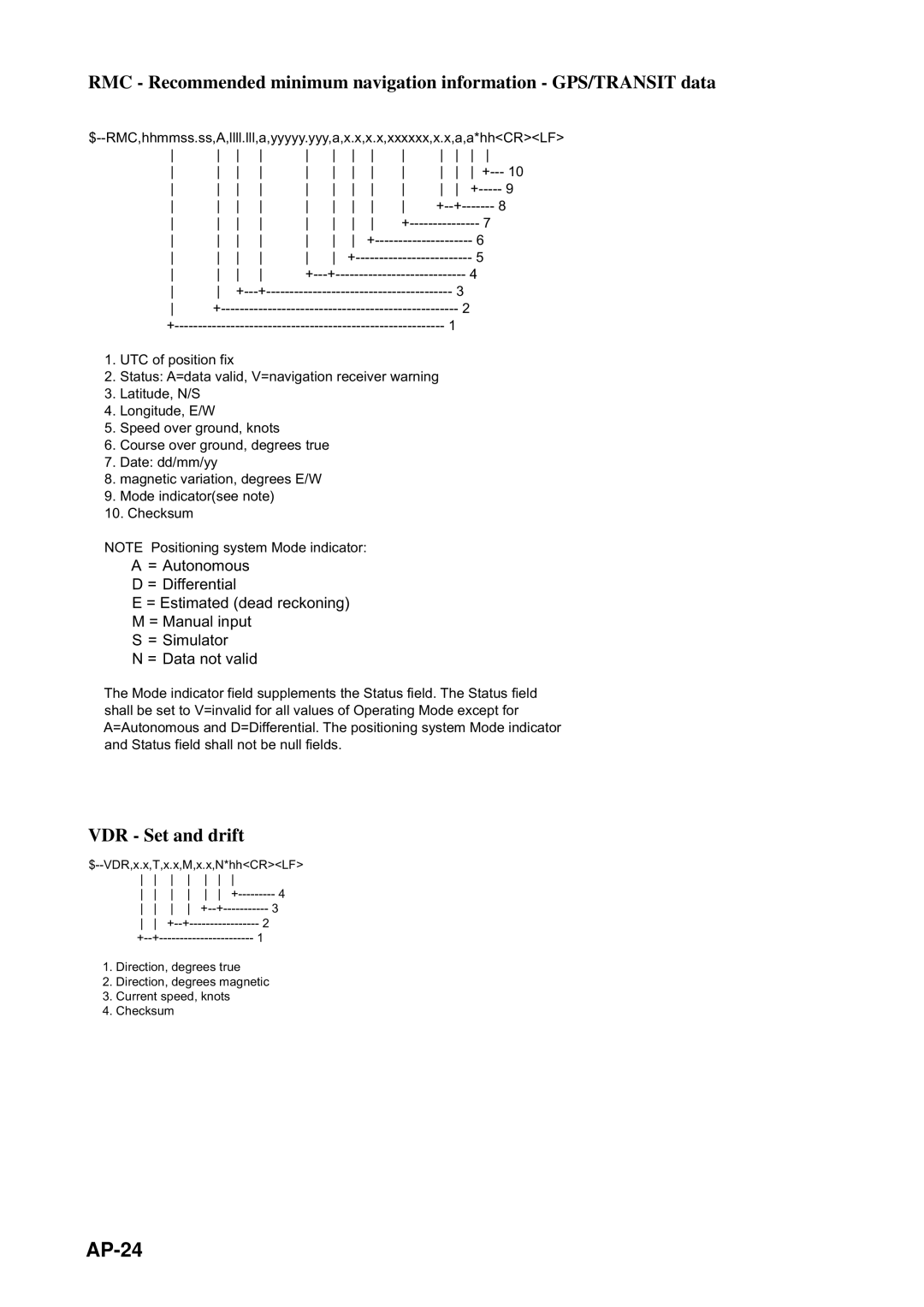
RMA Recommended minimum navigation information Loran C data
AP-23
RMB Recommended minimum navigation information
AP-24
VDR Set and drift
VTG Course over ground and ground speed
AP-25
WPL Waypoint location
AP-26
ZDA Date and time
Index
IN-1