Processes
OM-196 188K
Description
From Miller to You
Table of Contents
100
Introduction to Programming
101
Control Menu
Setup
Standards
Directives
Electric Shock can kill
Symbol Usage
Marks a special safety message
Arc Welding Hazards
Buildup of GAS can injure or kill
ARC Rays can burn eyes and skin
Welding can cause fire or explo- sion
Flying Metal can injure eyes
Principal Safety Standards
About Pacemakers
EMF Information
LES Fumées ET LES GAZ peuvent être dangereux
Signification des symboles
Consignes DE Securite Lire Avant Utilisation
UN Choc Électrique peut tuer
LE Bruit peut affecter l’ouïe
LE Soudage peut provoquer un incendie ou une explosion
DES Particules Volantes peuvent blesser les yeux
DES Pièces Chaudes peuvent pro- voquer des brûlures graves
DES Organes Mobiles peuvent provoquer des blessures
Risque D’INCENDIE OU
LA Chute DE L’APPAREIL peut blesser
’EMPLOI Excessif peut
Information sur les champs électromagnétiques
Principales normes de sécurité
Consignes relatives aux stimulateurs cardiaques
Manufacturer’s Warning Label Definitions
Definitions
60 s
∠ =
Harmonic Data per IEC 61000-3-12, draft
Symbols And Definitions
Manufacturer’s Rating Label
Harmonic Data
Specifications
Installation
Dimensions And Weight
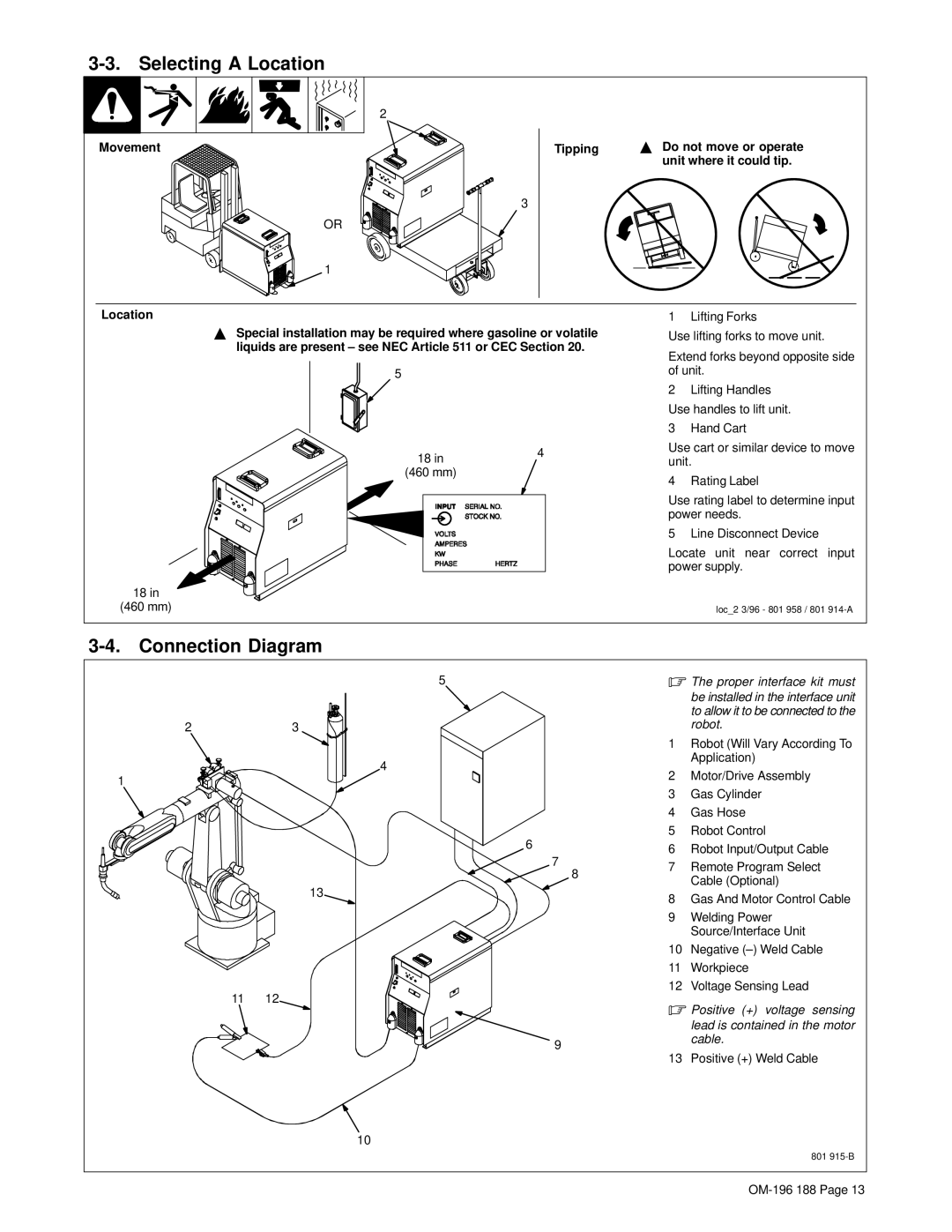
Tipping
Connection Diagram
Selecting a Location
Movement Location
Duty Cycle
Weld Output Terminals And Selecting Cable Sizes
Volts AC Duplex Receptacle And Circuit Breakers
10 100% Duty Cycle
Always connect grounding conductor first
Electrical Service Guide
Connecting Input Power
Three-Phase
Example Receptacle
Rear Panel Connections
Socket Information
Peripheral Receptacle Functions
Front
Touch Sensor Board PC18 Switch S1 Settings
Touch Sensor Operation
Top View
Turn Off welding power source and weld control
Connecting Setup Pendant To Welding Power Source
Operational Terms
Operation
Meter Functions
Lower Front Panel Controls
Upper Front Panel Controls
Volt-Ampere Curves
Duty Cycle And Overheating
Overheating
Increase Button
Setup Pendant Controls
Months
Maintenance & Troubleshooting
Routine Maintenance
Blowing Out Inside Of Unit
Removing Case and Measuring Input Capacitor Voltage
Help 1 Display
Voltmeter/Ammeter Help Displays
Front Panel Error Displays
LED2 LED4 LED8 LED10 LED11 LED6 LED3 LED5 LED7 LED9 LED12
Weld Interface Board PC12 Diagnostic LED’s
Status Diagnosis
Diagnostic LED’s On Weld Interface Board PC12
Customer Interface Board PC14 Diagnostic LED’s
Diagnostic LED’s On Customer Interface Board PC14
Motor Board PC13 Diagnostic LED’s
Troubleshooting
Diagnostic LED’s On Motor Board PC13
Trouble Remedy
OM-196 188
Circuit Diagram For Welding Power Source
Electrical Diagrams
203 505-A
Circuit Diagram For Control Board PC1 Part 1
203 311 1
Circuit Diagram For Control Board PC1 Part 2
203 311 2
Circuit Diagram For Control Board PC1 Part 3
203 311 3
Circuit Diagram For Function/Meter Board PC3
190
Circuit Diagram For Interconnect Board PC2
OM-196 188
Circuit Diagram For Interface Module
193 709-A
Circuit Diagram For Microprocessor Board PC11
191
10. Circuit Diagram For Motor Board PC13
212 354-A
11. Circuit Diagram For Switch Board PC15
12. Circuit Diagram For Junction Board PC16
13. Circuit Diagram For Interface Board PC12 Part 1
191 843-A Part 1
14. Circuit Diagram For Interface Board PC12 Part 2
191 843-A Part 2
15. Circuit Diagram For Customer Interface Board PC14 Part 1
Pensar 86147s03 Part 1
16. Circuit Diagram For Customer Interface Board PC14 Part 2
Pensar 86147s03 Part 2
17. Circuit Diagram For Customer Interface Board PC14 Part 3
Pensar 86147s03 Part 3
18. Circuit Diagram For Touch Sensor Board PC18
19. Circuit Diagram For Setup Pendant
200
21. Circuit Diagram For Power Distribution Board PC20
Complete Assembly
Parts List
PLG21
RC10
Optional
194 Setup Pendant
OM-196 188
Programming Instructions for
Standard Pulse Welding Programs
Program Hardwire Selected Softwire Selected
Introduction to Programming
Pulse MIG Programs
Program 2 1.0 mm Steel .040, 80-20 Argon-CO2
Program 1 1.2 mm Steel .045, 98-2 Argon-Oxy
Program 4 .8 mm 316 .030, 98-2 Argon-CO2
Program 3 1.2 mm Steel .045, 80-20 Argon-CO2
Gas Ar CO2 / 19 L/min 40 CFH
Program 6 1.2 mm 316 .045, 98-2 Argon-CO2
Program 5 1.0 mm 316 .040, 98-2 Argon-CO2
Program 8 1.2 mm 308L .045, 98-2 Argon-CO2
Program 7 1.0 mm 308L .040, 98-2 Argon-CO2
Program 2 1.4 mm Metal Core .052, 95-5 Argon-CO2
Program 1 1.2 mm Metal Core .045, 95-5 Argon-CO2
Program 4 1.0 mm ER 4043 .040, Argon
Wire Size/Type 1.2 mm .045 ER Gas Ar / 19 L/min 40 CFH
Wire Size/Type 1.0 mm .040 ER Gas Ar / 19 L/min 40 CFH
Program 3 1.2 mm ER 4043 .045, Argon
Program 6 1.2 mm ER 5356 .045, Argon
Program 5 1.0 mm 5356 .040, Argon
Program 8 1.0 mm Steel .040, 98-2 Argon-Oxy
Program 7 .8 mm Steel .030, 98-2 Argon-Oxy
Gas Ar Oxy/ 19 L/min 40 CFH
Setup Pendant Mode Select Button
Setup Pendant Parameter Select Button
Setup Pendant Parameter Increase And Decrease Buttons
Getting Started for Pulse Welding
Setting Preflow Sequence Display
Weld Cycle For Pulse Welding
Setting Crater Sequence Display
Setting Weld Sequence Display
Teaching a Pulse Welding Program
Setting Postflow Sequence Display
Pulse Waveform Explained
IPM
Teach Points Explained
Page
Setting Teach Point Parameters For Pulse Welding Program
Sec Run-In Trim
Wire Size/Type Gas
Card # Gun Model Flowrate
PWms Vpk
Changing To Adaptive Pulse Welding
Teaching a MIG Welding Program
Weld Cycle For Mig Welding
Changing To Mig Welding
Setting Start Sequence Display
Setting Retract Sequence Display
Poflw Sec Parameter Select Postflow Parameters Display
Setting Run-in Sequence Display
Selecting And Adjusting SharpArcE Control
Setting SharpArcE Control
Installing Data Card
Using the Optional Data Card
Using The Data Card
Yes
Naming Programs And Writing To Card
Reading From Card
Deleting Programs From Card
Reading Or Deleting From An Empty Card
Selecting Security Lock
Security lock works only when a data card is inserted
Display Features Settings Default
Setup
Setup Flow Chart
Features Settings Default Section
T u p
Using Setup Displays
ZWX
Selecting Or Changing Access Code
Selecting Auxiliary Output
Selecting Voltage Correction
Selecting Voltage Sensing Method
Selecting Arc Start Method
Resetting Arc Time
Selecting Units For Wire Feed Speed And Motor Type
Defining Display Value
Selecting Wire Type
Selecting Arc Start/Volt Sense Error Shutdown
Resetting Memory
Program No Output a Output B Output C
Selecting Program Name Feature
Remote Program Setting
Remote Program Select
Flow Selection
Jog Wire Feed Speed Selection
Stick Check Selection
Arc Voltage Error Selection
Exiting The Setup Menu
Setting Ramps Function
Software Version Number
Control Menu
Using Menu Display
Setting Adaptive Parameters
Setting Rise Time Parameter
Setting Auto Configure Parameter
Setting Sharp Start On/Off
Setting Retract On/Off
Exiting The Control Menu
Page
Support
Service
Miller Electric Mfg. Co
Owner’s Record