Automation and Drives - SCE
2.7.3.1 Proportional Controllers (P-Controller)
In the case of a P-controller, the controller output y is always proportional to the recorded system deviation (y ~ e). The result is that a P-controller responds to a system deviation without a delay, and generates a controller output only if there is a deviation e.
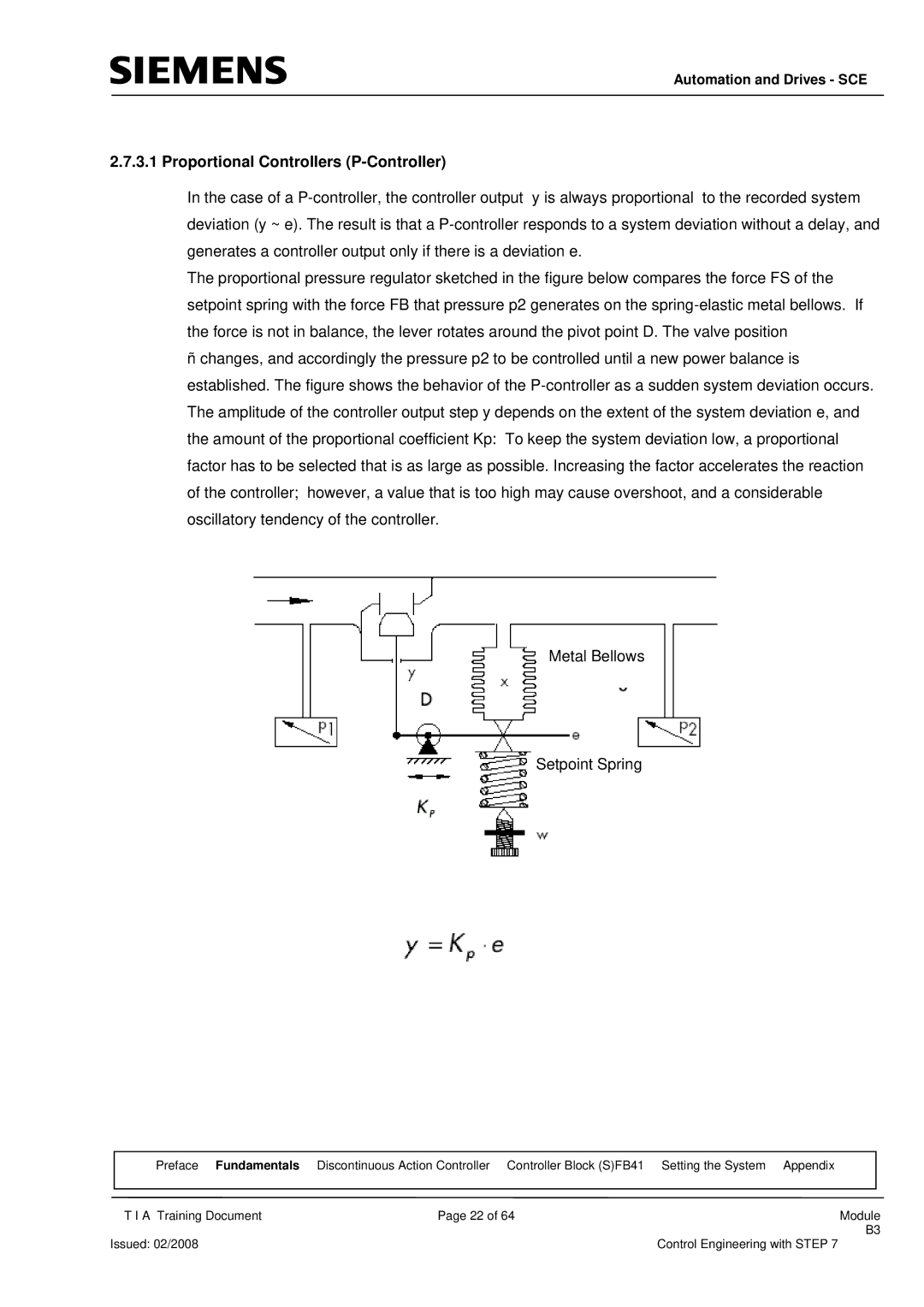
The proportional pressure regulator sketched in the figure below compares the force FS of the setpoint spring with the force FB that pressure p2 generates on the spring-elastic metal bellows. If the force is not in balance, the lever rotates around the pivot point D. The valve position
ñchanges, and accordingly the pressure p2 to be controlled until a new power balance is established. The figure shows the behavior of the P-controller as a sudden system deviation occurs. The amplitude of the controller output step y depends on the extent of the system deviation e, and the amount of the proportional coefficient Kp: To keep the system deviation low, a proportional factor has to be selected that is as large as possible. Increasing the factor accelerates the reaction of the controller; however, a value that is too high may cause overshoot, and a considerable oscillatory tendency of the controller.
Metal Bellows
Setpoint Spring
| Preface | Fundamentals | Discontinuous Action Controller Controller Block (S)FB41 | Setting the System Appendix | |
| | | | |
| T I A Training Document | Page 22 of 64 | Module |
| | | | B3 |
Issued: 02/2008 | | | Control Engineering with STEP 7 |