Automation and Drives - SCE
5. SETTING CONTROLLED SYSTEMS
5.1 General
Below, setting controlled systems is discussed, using a PT2 system as an example.
Tu-Tg Approximation
The basis for the methods according to
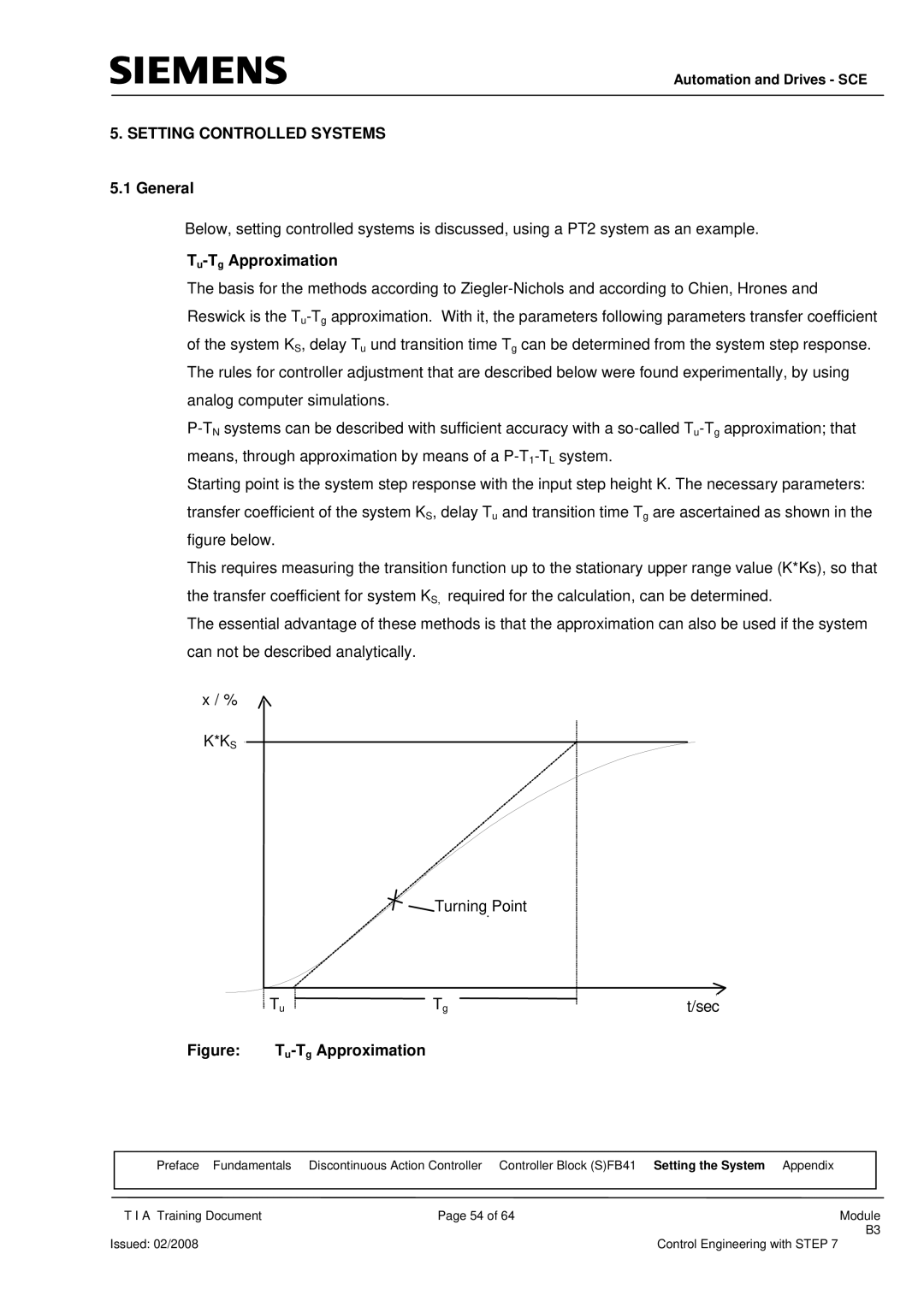
Starting point is the system step response with the input step height K. The necessary parameters: transfer coefficient of the system KS, delay Tu and transition time Tg are ascertained as shown in the figure below.
This requires measuring the transition function up to the stationary upper range value (K*Ks), so that the transfer coefficient for system KS, required for the calculation, can be determined.
The essential advantage of these methods is that the approximation can also be used if the system can not be described analytically.
x / % |
|
|
|
K*KS |
|
|
|
|
| Turning Point |
|
|
| Wendepunkt |
|
| Tu | Tg | t/sec |
Figure: |
|
|
|
| Preface Fundamentals | Discontinuous Action Controller Controller Block (S)FB41 | Setting the System Appendix |
|
|
|
|
|
|
| T I A Training Document | Page 54 of 64 | Module | |
|
|
| B3 | |
Issued: 02/2008 |
| Control Engineering with STEP 7 | ||