Automation and Drives - SCE
2.9 Digital Controllers
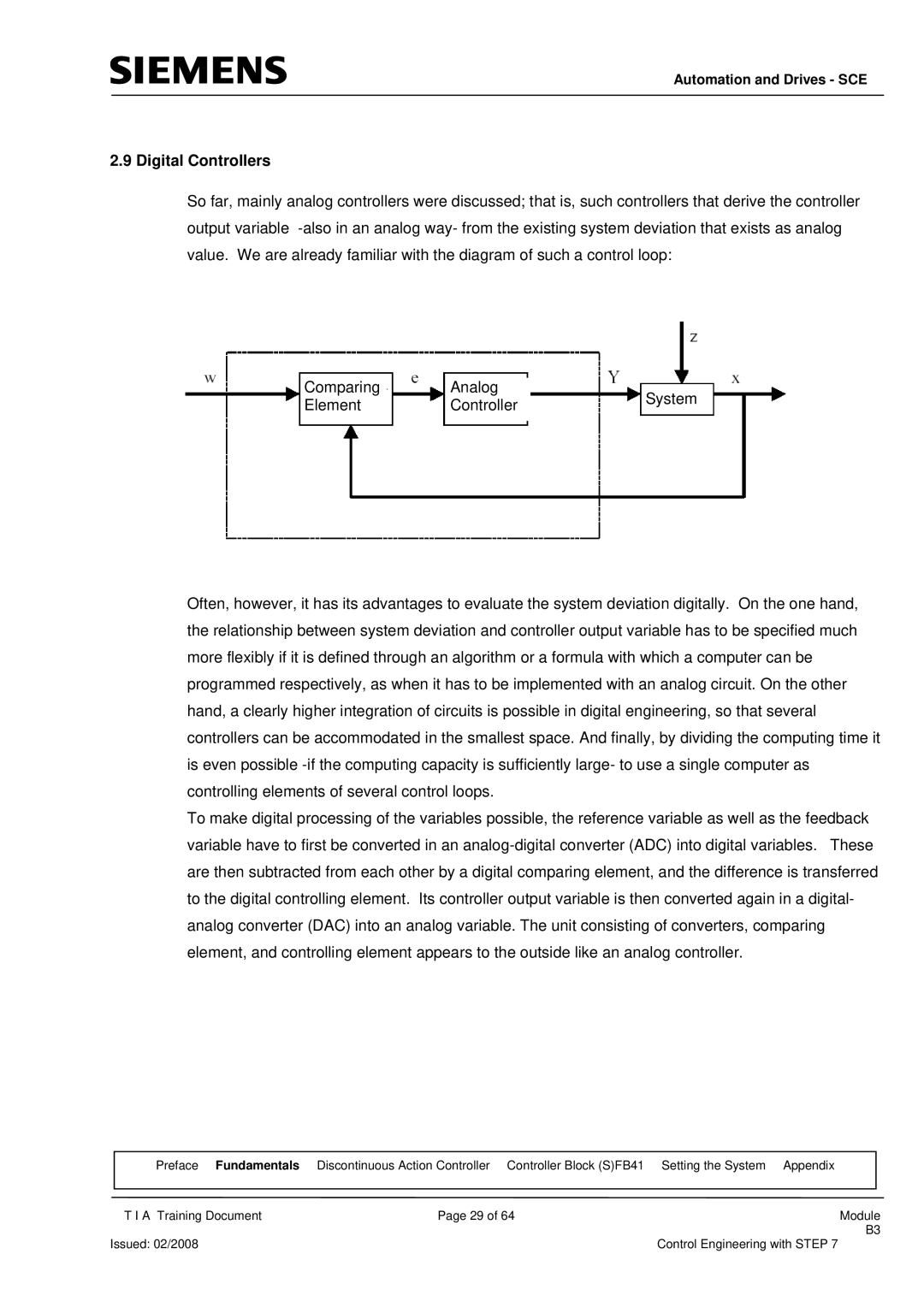
So far, mainly analog controllers were discussed; that is, such controllers that derive the controller output variable
Comparing Analog
ElementControllerSystem
Often, however, it has its advantages to evaluate the system deviation digitally. On the one hand, the relationship between system deviation and controller output variable has to be specified much more flexibly if it is defined through an algorithm or a formula with which a computer can be programmed respectively, as when it has to be implemented with an analog circuit. On the other hand, a clearly higher integration of circuits is possible in digital engineering, so that several controllers can be accommodated in the smallest space. And finally, by dividing the computing time it is even possible
To make digital processing of the variables possible, the reference variable as well as the feedback variable have to first be converted in an
| Preface | Fundamentals Discontinuous Action Controller Controller Block (S)FB41 Setting the System Appendix |
| ||
|
|
|
|
| |
| T I A Training Document | Page 29 of 64 | Module | ||
|
|
|
| B3 | |
Issued: 02/2008 |
|
| Control Engineering with STEP 7 | ||