Automation and Drives - SCE
2.7.3.4 Derivative Action Controllers (D-Controller)
The D-controller generates its controller output from the rate of change of the system deviation, and not -like the P-controller- from its amplitude. For that reason, it still responds considerably faster than the P-controller. Even if the system deviation is small, it generates -in anticipation, as it were- large margins of the manipulated variable as soon as the amplitude changes. On the other hand, the D- controller does not know a lasting system deviation; because, regardless of how large it is, its rate of change equals zero. In practice, the D-controller is used rarely by itself for that reason. Rather, it is used together with other control elements, usually in connection with a proportional component.
2.7.3.5 PID Controllers
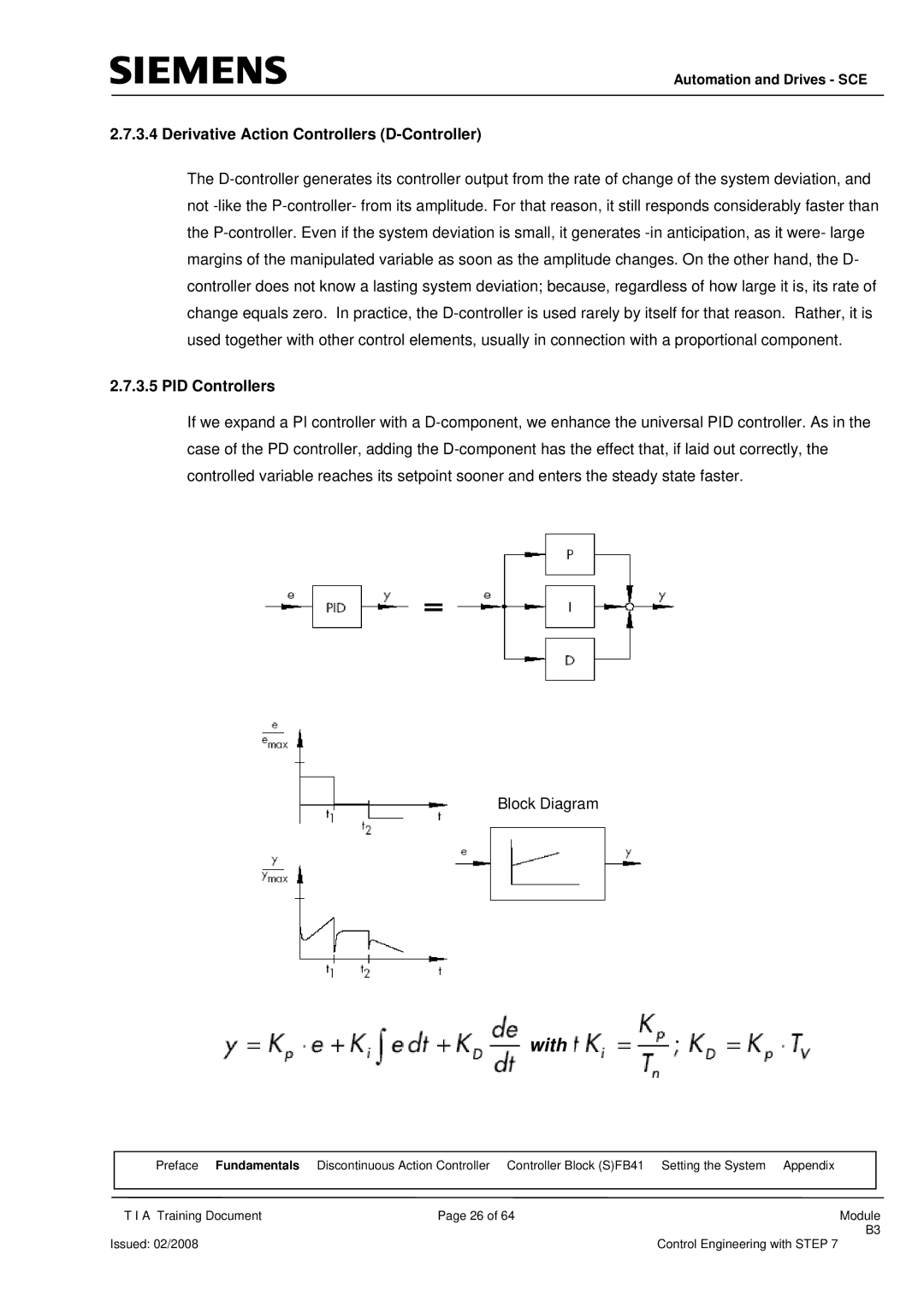
If we expand a PI controller with a D-component, we enhance the universal PID controller. As in the case of the PD controller, adding the D-component has the effect that, if laid out correctly, the controlled variable reaches its setpoint sooner and enters the steady state faster.
Block Diagram
with
| Preface | Fundamentals | Discontinuous Action Controller Controller Block (S)FB41 | Setting the System Appendix | |
| | | | |
| T I A Training Document | Page 26 of 64 | Module |
| | | | B3 |
Issued: 02/2008 | | | Control Engineering with STEP 7 |