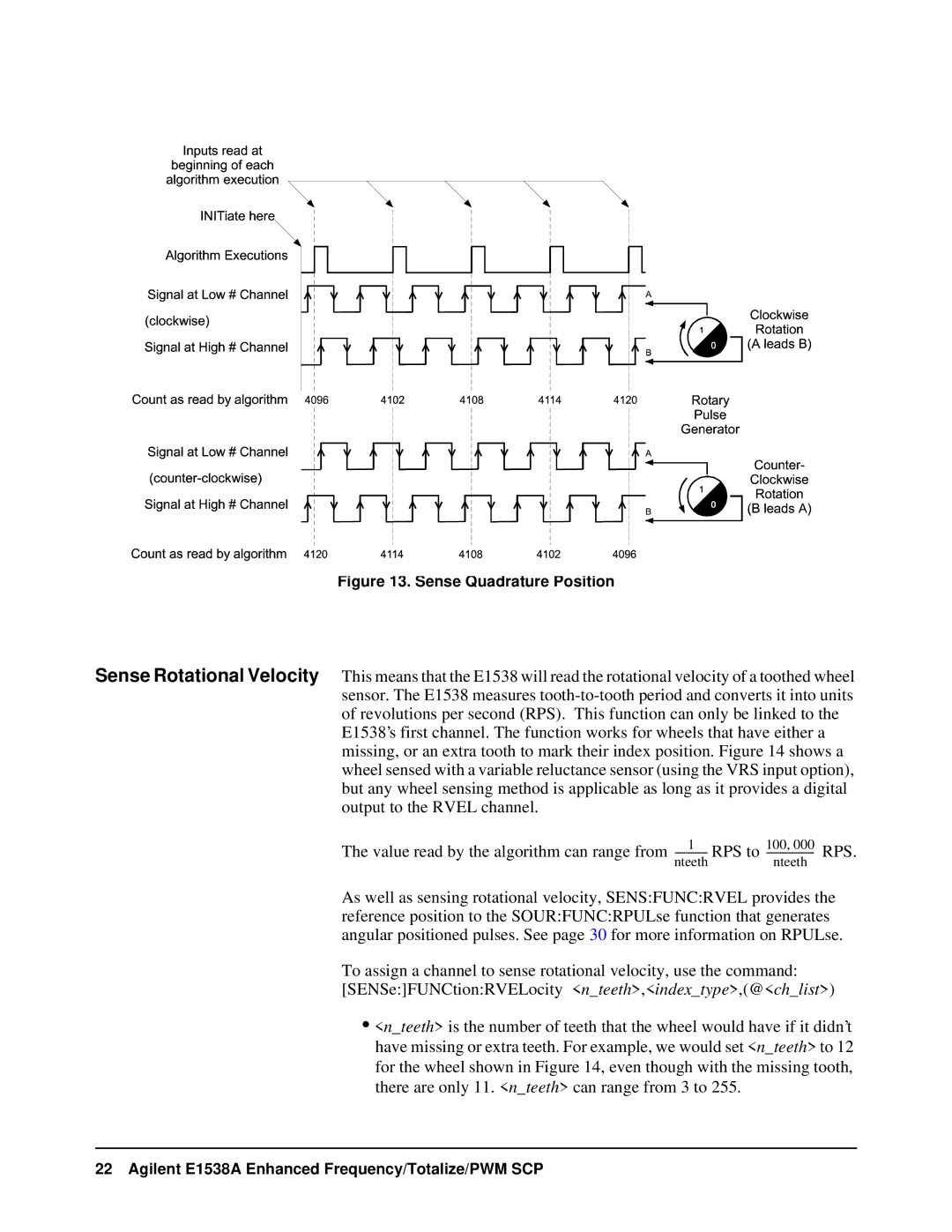
Figure 13. Sense Quadrature Position
Sense Rotational Velocity This means that the E1538 will read the rotational velocity of a toothed wheel sensor. The E1538 measures
The value read by the algorithm can range from | 1 | RPS to | 100, 000 | RPS. |
nteeth | nteeth | |||
|
|
|
As well as sensing rotational velocity, SENS:FUNC:RVEL provides the reference position to the SOUR:FUNC:RPULse function that generates angular positioned pulses. See page 30 for more information on RPULse.
To assign a channel to sense rotational velocity, use the command: [SENSe:]FUNCtion:RVELocity <n_teeth>,<index_type>,(@<ch_list>)
•<n_teeth> is the number of teeth that the wheel would have if it didn’t have missing or extra teeth. For example, we would set <n_teeth> to 12 for the wheel shown in Figure 14, even though with the missing tooth, there are only 11. <n_teeth> can range from 3 to 255.