•<mode> is used to select the stepping mode. the allowable values are:
Table 3. Stepping <mode> values
| <mode> string | Stepping Mode | Speed | Channel |
|
|
|
|
|
|
|
| MFSFC2 | Full | Full | 2 |
|
|
|
|
|
|
|
| MFSFC4 | Full | Full | 4 |
|
|
|
|
|
|
|
| MFSHC2 | Full | Half | 2 |
|
|
|
|
|
|
|
| MFSHC4 | Full | Half | 4 |
|
|
|
|
|
|
|
| MHSFC2 | Half | Full | 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Related error message:3127, "Undefined E1538 Stepper motor mode."
•The range of position values that an algorithm can send for the
•The range of position values that an algorithm can send for the
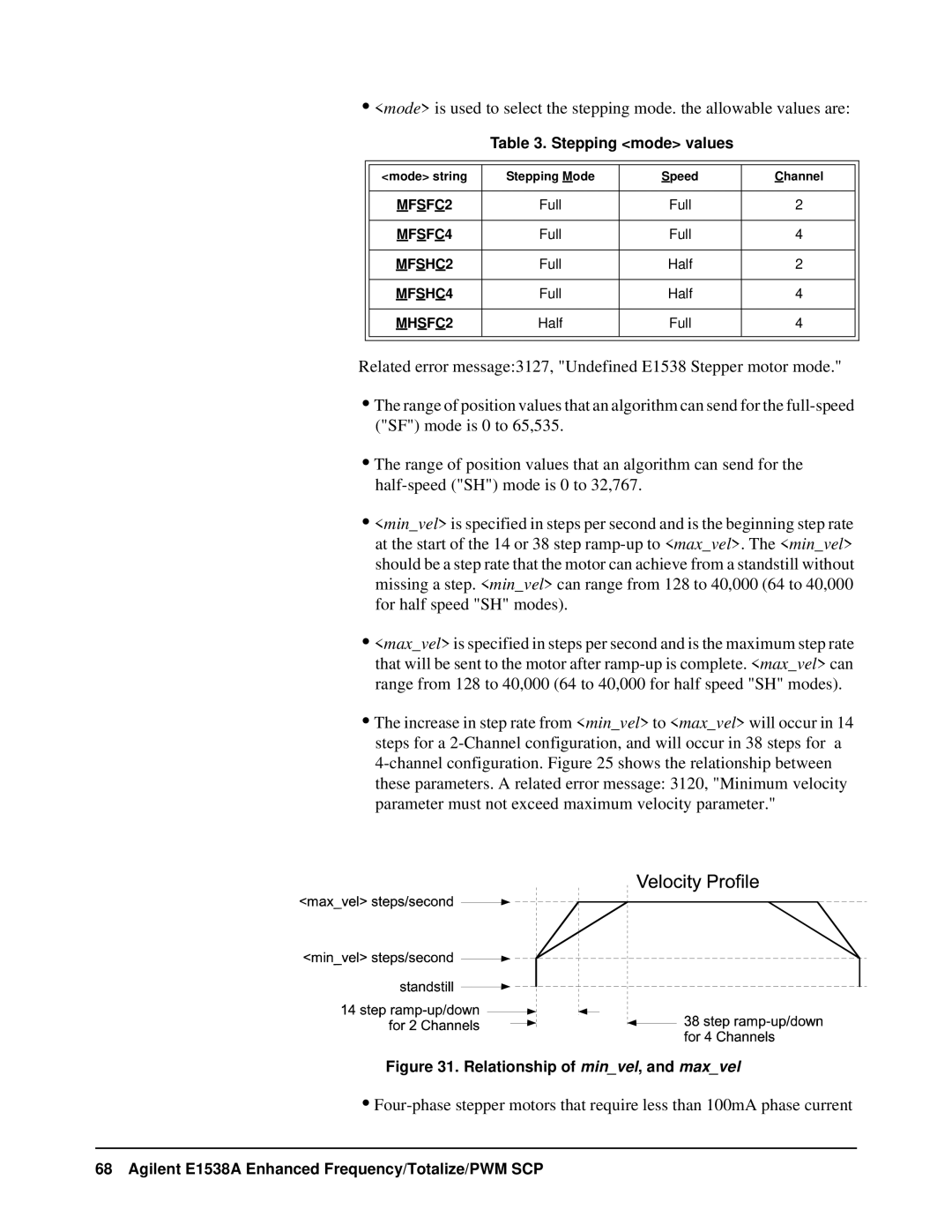
•<min_vel> is specified in steps per second and is the beginning step rate at the start of the 14 or 38 step
•<max_vel> is specified in steps per second and is the maximum step rate that will be sent to the motor after
•The increase in step rate from <min_vel> to <max_vel> will occur in 14 steps for a
Figure 31. Relationship of min_vel, and max_vel
•