2635A
Limited Warranty & Limitation of Liability
Table of Contents
2635A
Front Panel Operations
Memory Card Operations
Printer Operations
Index
2635A
List of Tables
Viii
List of Figures
Overall PC-to-Instrument Modem Connection
Interference Information
Safety Terms in this Manual
Symbols Marked on Equipment
Use the Proper Power Cord
AC Power Source
DC Power Source
Use the Proper Fuse
Ten Minute Tour
Introduction
OFF VAC
Power Func
SET Func
Ten Minute Tour
Selecting a Measurement Scale. Select
Scan
Scan MON
SET
Review
Alrm
Mx+B SET Mx+B
SLO
YEAR TotAL
OFF
Mode
LISt
DESt
ALL
Xxiii
Xxiv
Preparation for Use
2635A
Preparation for Use 1 Introduction
Hydra
Introduction
Operating Modes
Data Bucket Features
Front Panel Operation
Ground Terminal AC Power Connector Universal Input Module
Alarm Outputs Connector Digital I/O Connector RS-232C
Memory Card Operation
Computer Operation
Printer Operation
Modem Operation
Measurement Capabilities
Applications Software
Hydra Starter Package
Options and Accessories
Connector Set, 2620A-100
Hydra Logger
Unpacking and Inspecting the Instrument
Setting Up the Instrument
Options and Accessories
Model
Adjusting the Handle
Connecting the Instrument to a Power Source
AC Operation
DC Operation
Input Channels
Crosstalk
Using Shielded Wiring
Measurement Connections
Universal Input Module Connections
Measurement Connections
Sense
Wire 2T Connection Source
Wire 4T Connection Source
Resistance
Alarm Outputs
Alarm Outputs Connections
DC Power
External Trigger Input
Totalizer Input
Digital I/O Connections
Digital I/O
Digital I/O
Front Panel Controls
Controls and Indicators
Front Panel Indicators
Auto MON
11. Secondary Display
12. Annunciator Display
Rate K J Clock K I Mode K P
Key
Front Panel Keys Description
Annunciator Descriptions
Func Alarm
Clear Local K Comm K L Zero Single K Q
MON Scan SET
Annunciator Annunciator Descriptions
OFF Auto Limit HI, LO Review MIN, MAX Last PRN EXT REM CAL
2635A
Front Panel Operations
Using the Monitor Mode Using the Review Mode
Front Panel Operations
Hydra Data Bucket
How to use the Control/Annunciator Diagrams
Summary of Front Panel Operations
Configuring the Instrument for Operation
Turning the Power on
Selftest Error Codes Description
Configuration Reset Default Settings Parameter
Default Setting
Code
Configuring a Measurement Channel
Selecting a Channel
Restrictions
Configuring a Channel to Measure DC Volts
Func SET Func
Configuring a Channel to Measure AC Volts
Configuring a Channel to Measure AC Volts
Configuring a Channel to Measure Resistance
Configuring a Channel to Measure Resistance
Configuring a Channel to Measure Frequency
Configuring a Channel to Measure Frequency
Resistance Temperature Detectors Restrictions
Configuring a Channel to Measure Temperature
Resistance-Temperature Detectors
Thermocouples
ANSI* IEC
Thermocouple Ranges Type Material
Positive Lead Color
Negative Lead Material
Configuring a Channel to Measure Temperature RTDs
Setting Operating Conditions
Configuring a Channel Off
Setting the Scan Interval
11. Setting the Scan Interval
Alarm Indications While Scanning
Setting the Measurement Rate
Setting the Alarms
RAtE
Alarm Indications While Monitoring
Alarm Indications While Reviewing
Clearing Alarm Parameters from a Channel
Alarms and Mx+B Scaling
Alarms and Autoprinting
Alarms and Monitor-Alarm Triggering
TLL Alarm Outputs Channels 0 to Decimal
TTL Alarm Outputs Channels 4 to
Channels
13. Setting the Alarms
Alrm Limit
Setting the Mx+B Scaling
Examples
Clearing Mx+B Scaling from a Channel
14. Setting the Mx+B Scaling
Required From the previous
Using the Scan Mode
Memory Card Data Extraction
Path to OPEn DAtxx Menu
Memory Card Error Messages
16. Memory Card Error Messages
Using the Monitor Mode
17. Using the Monitor Mode
Using the Review Mode
18. Using the Review Mode
Scan Triggering Options
Additional Features
Monitor-Alarm Trigger
External Trigger
Totalizer Operation
19. Scan Triggering Options
Digital Input/output Lines
Xxxxx
Setting Date and Time
Year
Mn.dY
Returning to the Local Mode
Reading Instrument Software Versions
Returning to the Local Mode. Press
Front Panel Key Lockout Options
REM Monitor Mode Review
Instrument Interfaces
Memory Card Interface
Using the RS-232 Computer Interface With a Printer
Using the RS-232 Computer Interface With a Modem
RS-232 Computer Interface
2635A
Memory Card Operations
Recording Measurement Results During Scanning
256KB
Lithium Battery 3 Volts
Insertion Direction PIN Connector
WRITE-PROTECT Switch
Summary of Memory Card Operations
Setup Files
Data Files
Memory Card Capacity
Installing or Replacing the Memory Card Battery
Inserting and Removing the Memory Card
Error
Memory Card Error Codes Probable Cause
Init
Initializing a Memory Card
Files
SUrE
Recording Measurement Results During Scanning
MOdE
SEtUP
Setup File Procedures
Using Setup Store
StorE
Using Setup Load
Using Setup Load to Load Configuration Files
Using Setup Erase
ErASE
Data File Procedures
Using Data Open
DAtA
Using Data Erase
Using Data Erase to Delete a Measurement Data File
Setup and Data Files Directory
NnnnK
Setup and Data File Current Status
USEd
Memory Card File Operations to and from a PC
Computer Operations
Op82f.eps
Connecting the Instrument to a PC
Summary of Computer Operations
Connector
PC Connection With DB-9
PC Connection With DB-25
Configuring the Instrument for Computer Operations
PAR
Configuring the PC for Computer Operations
Testing the Instrument/PC RS-232 Interface
Rstfunc 0,VDC,4PRINTTYPE 0,0PRINT 1*TRG
2635A
Testing the RS-232 Interface Using Gwbasic
Open COM1,9600,N,8,1,CS,CD for Random AS #1
Testing the RS-232 Interface Using Qbasic
Print #1, Printtype 0,0PRINT INPUT$20, #1
IDN?
Computer Interface Commands and Operation
How the Instrument Processes Input
Input Terminators
Input String Examples
Sending Numeric Values to the Instrument
How the Instrument Processes Output
Status Registers
Instrument Event Register IER
Overview of Status and Event Data Registers
Standard Event Status Register ESR
Bit Name
Instrument Event Register IER Description
Status Byte Register STB
Bit Event Status Register ESR Name Description
IEB
Computer Interface Command Set
Xmodem File Transfers
MAV ESB
DIOLEVELS? Dolevel
Command and Query Summary
Echo
Func FUNC? RTDR0 RTDR0? RANGE?
MON MONCHAN? MONVAL?
Rate RATE?
MAX? MIN? NEXT?
Scalemb SCALEMB?
Format FORMAT?
Tempconfig TEMPCONFIG?
Lock LOCK? Locs Lwls Rems Rwls
Reviewclr
Total TOTAL? Totaldbnc TOTALDBNC?
IDN? TST?
Date Time TIMEDATE?
Trigger TRIGGER?
Command and Query Reference
Cntlc CLS ESE ESE? ESR?
IDN?
Field Description
OPC OPC? RST SRE SRE?
TRG
TST? WAI
ALARMS?
Alarmassoc
ALARMASSOC?
Alarmassocclr
Alarmdolevel
ALARMDOLEVELS?
Alarmlimit
ALARMLIMIT? CLS Date
LO OFF
DIOLEVELS? Digital I/O State Query
DIR
Echo ESE ESE? ESR? FILEERROR? Fileload
FILEOPEN? Fileremove
FILESPACE? Filestore
Configuration File Tag
MX+B
Format
Measurement Units String
VDC
Func
Range Voltage Ohms Frequency
FUNC? IDN? IEE
IEE? IER?
Intvl INTVL? LAST?
Lock
LOCK? Locs LOG? LOGGED?
LOGBIN? Logclr LOGCLR1 LOGCOUNT?
Logmode LOGMODE? Lwls
BIT Memory Card Battery Status
MAX? MCARD?
MAX?
Mcardformat
MCARDSIZE?
Disables monitoring
OPC OPC? Print
PRINT? Printtype
PRINTTYPE?
Rate RATE? Rems Reviewclr RST RTDR0
RTDR0? Rwls
Scalemb
SCALEMB? Scan
SCAN? SCANTIME? SRE SRE? STB? Tempconfig
TEMPCONFIG?
Total
TOTAL? Totaldbnc TOTALDBNC? TRG Trigger
Returns an integer representing the present trigger type
Sample Program Gwbasic 1
Sample Program Gwbasic 2
Sample Program Qbasic 1
Sample Program QBASIC2
Sample Program Qbasic 3
Sample Program QuickC 1of
Sample Program QuickC 2
Sample Program QuickC 3
Sample Program QuickC4
Sample Program QuickC5
Printer Operations
Op83f.eps
Connecting the Instrument to a Printer
Summary of Printer Operations
SERIAL-INPUT
Printer
PARALLEL-INPUT
Configuring for Printer Operations
Configuring the RS-232 Ports for Print Operations
Problems?
Printing Measurement Data and Memory Card Directory
Printing Measurement Results During Scanning
Printing Measurement Data and Memory Card Directory
Printing the Review Array
Printing the Review Array
Printing the Directory of the Memory Card
Printing the Memory Card Directory
2635A
Configuring the Instrument for Modem Operations
Modem Operations
Op84f.eps
Summary of Modem Operations
Overall PC-to-Instrument Modem Connection
Connecting the Modem to a PC for Modem Configuration
Configuring the Instrument Modem for Modem Operations
Modem Connection With PC DB-9 Connector
Modem Connection With PC DB-25 Connector
Connecting the Modem to an Instrument
Connecting the Modem to an Instrument
Configuring the Instrument for Modem Operations
Enter
Testing the RS-232/Modem Interface
Maintenance
Dedicated Alarm Output Test
Calibrator
Introduction Cleaning
Line Fuse
Selftest Diagnostics and Error Codes
Error Power-Up Error Codes Description
Performance Tests
Performance Tests
Recommended Model
Recommended Test Equipment Minimum Specification
Instrument Type
Instrument Type Recommended Model
Range
Accuracy Verification Test
Function
Input Level Frequency
Channel Integrity Test
Thermocouple Measurement Range Accuracy Test
Thermocouple Temperature Accuracy Test
Four-Terminal Resistance Test
Open Thermocouple Response Test
Hydra Input Module
5700A
UUT
RTD Temperature Accuracy Test
RTD Temperature Accuracy Test Using Decade Resistance Source
Temperature Accuracy
RTD Temperature Accuracy Test Using DIN/IEC 751 RTD
Temperature Simulated
Decade Resistance Source
Digital Input/Output Verification Tests
Digital Output Test
Dolevel 0,0 CR
Digital Input Test
Digital Input Values
Totalizer Test
Terminal Grounded
State of Digital Inputs
Dedicated Alarm Output Test
Totalizer Sensitivity Test
Maintenance
Module Sense
Alarm Output
GND Source Input
Hydra
Calibration
External Trigger Input Test
Service
Variations in the Display
Appendices
Appendix Title
Page
Resolution
Specifications
Accuracies at Ambient Temperatures Other than Specified
DC Voltage Measurements
Accuracy
Normal Mode Rejection
Common Mode Rejection
Input Impedance
Appendices
Maximum Input
Cross-Talk Rejection
Resolution
Accuracy
Temperature Measurements Thermocouples
Type Temperature Days Year Slow Fast 0C to 60C
2635A
Open Thermocouple Detect
Temperature Measurements RTDs
Common Mode and Normal Mode Rejection
RTD
AC Voltage Measurements
Wire Accuracy
Temperature Slow Fast
RTD Type
Table A-10. AC Voltage Measurements Resolution Range
Resolution Slow Fast
Minimum Input for Rated Accuracy
2635A Maximum Voltage Input VS. Frequency Input
Crest Factor Error
DC Component Error
Maximum Crest Factor
Resistance Measurements
Frequency Measurements
2635A Wire Accuracy
Resolution and Accuracy
Input Sensitivity
Typical Scanning Rate
Table A-17. Typical Scanning Rate
Maximum Autoranging Time
Totalizing Input
Digital Inputs
Minimum Pulse Width Maximum Frequency Specified Conditions
Trigger Inputs
Input Voltages
Maximum Latency
Digital and Alarm Outputs
Environmental Specifications
Real-Time Clock and Calendar
General
2635A Voltage Ratings
Weight
Power
Size
AC Signal Cross Talk in a DC Voltage Channel
Crosstalk Considerations
AC Signal Cross Talk into an AC Voltage Channel
AC Signal Cross Talk into an Ohms Channel
AC Signal Cross Talk into a Frequency Channel
AC Signal Crosstalk into a Temperature Channel
2635A
Binary Upload of Logged Data
Decoding the Ascii String
+--------+--------+--------+--------+
Figure C-1. Ascii String Decoding
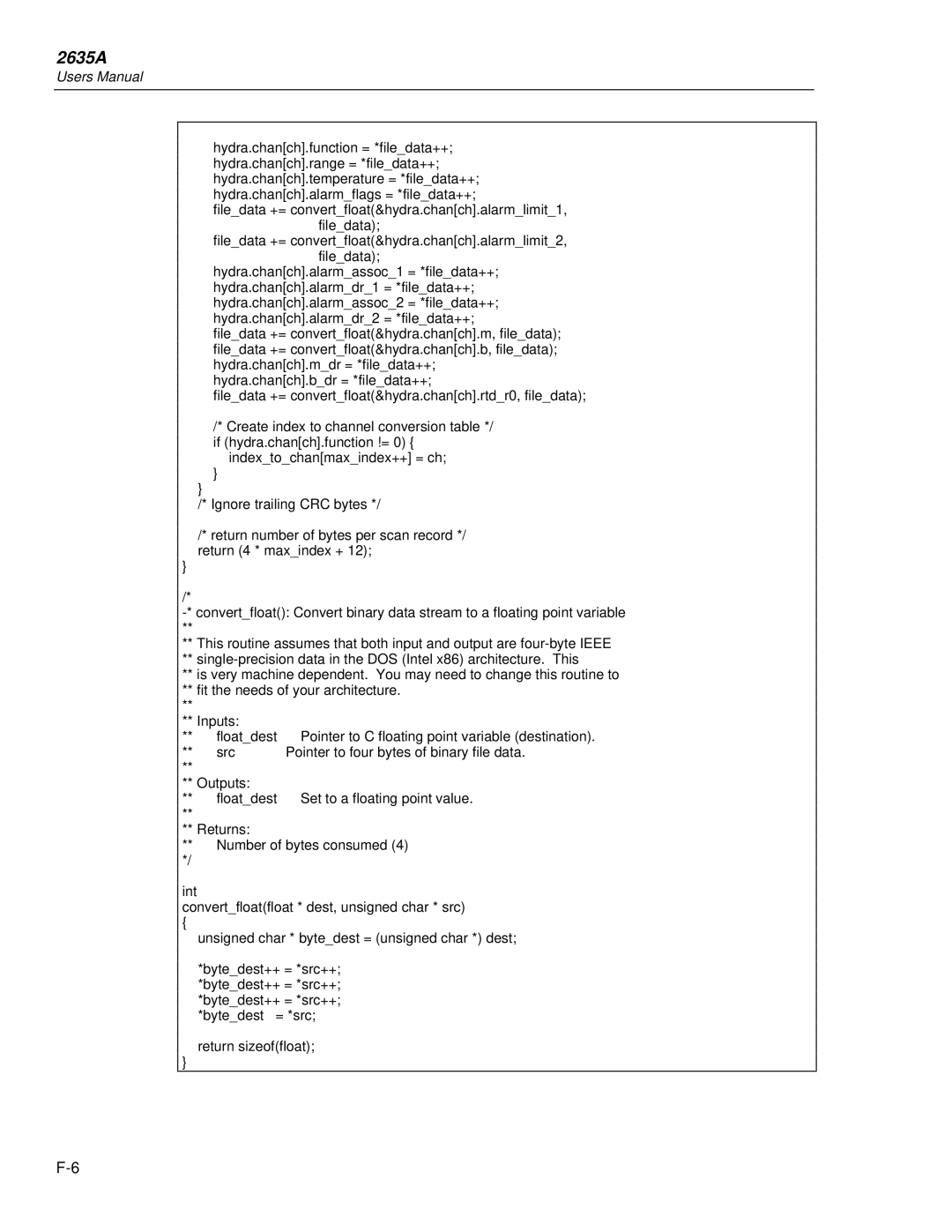
Floating Point Conversion
Sign Bit
Mmsb
Mlsb Lmsb
Figure C-2. FloatingPoint Conversion
Example
Figure C-3. Example
RS-232 Cabling
Cables
Figure D-1. Summary of RS-232 Connections
RS-232 Cabling D
Figure D-3. Hydra DB-9 to PC DB-25 RS-232 Connection
RS41 Cable or Equal
Printer
Connector
Side Male Female
Side
2635A
Bit Binary-Coded-Decimal Table
Table E-1 -Bit Binary-Coded-Decimal
Binary
Setup File Format
Memory Card File Formats
Data File Format
Trigger
Memory Card File Formats
Unsigned char mdr unsigned char bdr float rtdr0
Appendices
2635A
Appendices
2635A
True RMS Measurements
Effect of Internal Noise in AC Measurements
Waveform Comparison True RMS VS Average Responding
Sine
Component
Waveform RMS CAL Hydra Only
PK-PK
RS-232-C Communication
Temperature Units
Scan Rate
Output
Hydra Memory Card Record
Index
2635A
Index
2635A