[Reference]
command |
| mode |
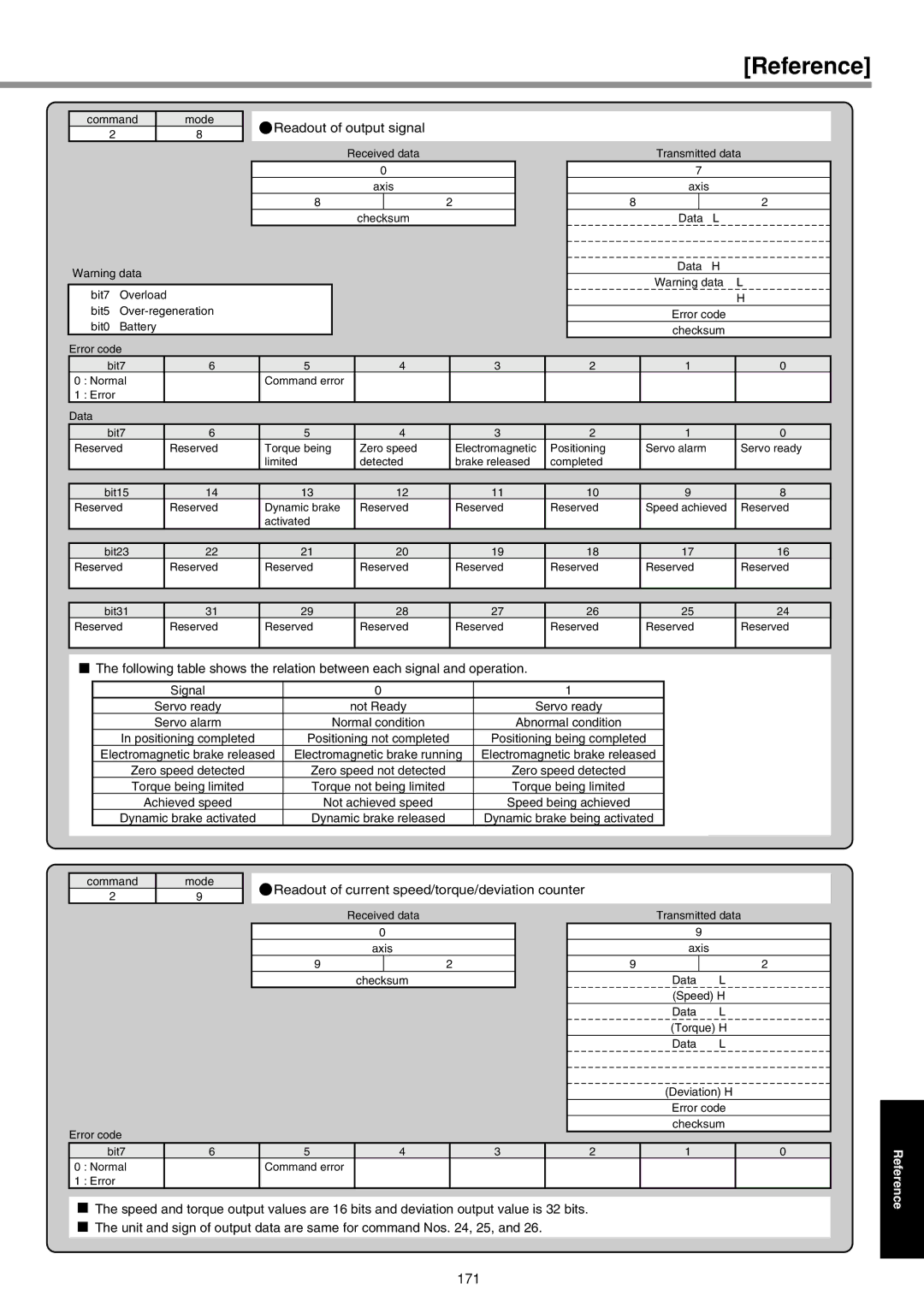
| Readout of output signal |
| |||
2 |
|
| 8 |
|
| |||
|
|
|
|
|
|
| ||
|
|
|
|
|
| Received data |
| |
|
|
|
|
| 0 |
| ||
|
|
|
|
|
| axis |
| |
|
|
|
|
| 8 |
|
| 2 |
|
|
|
|
|
| checksum |
| |
Warning data |
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
bit7 | Overload |
|
|
|
|
|
| |
bit5 |
|
|
|
|
| |||
bit0 | Battery |
|
|
|
|
|
| |
Error code
Transmitted data
7
axis
8 | 2 |
Data L
Data H
Warning data L
H
Error code
checksum
bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
0 : Normal |
| Command error |
|
|
|
|
|
1 : Error |
|
|
|
|
|
|
|
Data |
|
|
|
|
|
|
|
bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
Reserved | Reserved | Torque being | Zero speed | Electromagnetic | Positioning | Servo alarm | Servo ready |
|
| limited | detected | brake released | completed |
|
|
|
|
|
|
|
|
|
|
bit15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 |
Reserved | Reserved | Dynamic brake | Reserved | Reserved | Reserved | Speed achieved | Reserved |
|
| activated |
|
|
|
|
|
|
|
|
|
|
|
|
|
bit23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bit31 | 31 | 29 | 28 | 27 | 26 | 25 | 24 |
Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved |
|
|
|
|
|
|
|
|
The following table shows the relation between each signal and operation.
Signal | 0 | 1 |
Servo ready | not Ready | Servo ready |
Servo alarm | Normal condition | Abnormal condition |
In positioning completed | Positioning not completed | Positioning being completed |
Electromagnetic brake released | Electromagnetic brake running | Electromagnetic brake released |
Zero speed detected | Zero speed not detected | Zero speed detected |
Torque being limited | Torque not being limited | Torque being limited |
Achieved speed | Not achieved speed | Speed being achieved |
Dynamic brake activated | Dynamic brake released | Dynamic brake being activated |
command | mode |
2 | 9 |
![]() Readout of current speed/torque/deviation counter
Readout of current speed/torque/deviation counter
Error code
Received data
0
axis
9 | 2 |
checksum
Transmitted data
9
axis
9 | 2 |
Data L
(Speed) H
Data L
(Torque) H
Data L
(Deviation) H
Error code
checksum
| bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
0 | : Normal |
| Command error |
|
|
|
|
|
1 | : Error |
|
|
|
|
|
|
|
The speed and torque output values are 16 bits and deviation output value is 32 bits.
The unit and sign of output data are same for command Nos. 24, 25, and 26.
Reference