|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| [Reference] | |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||
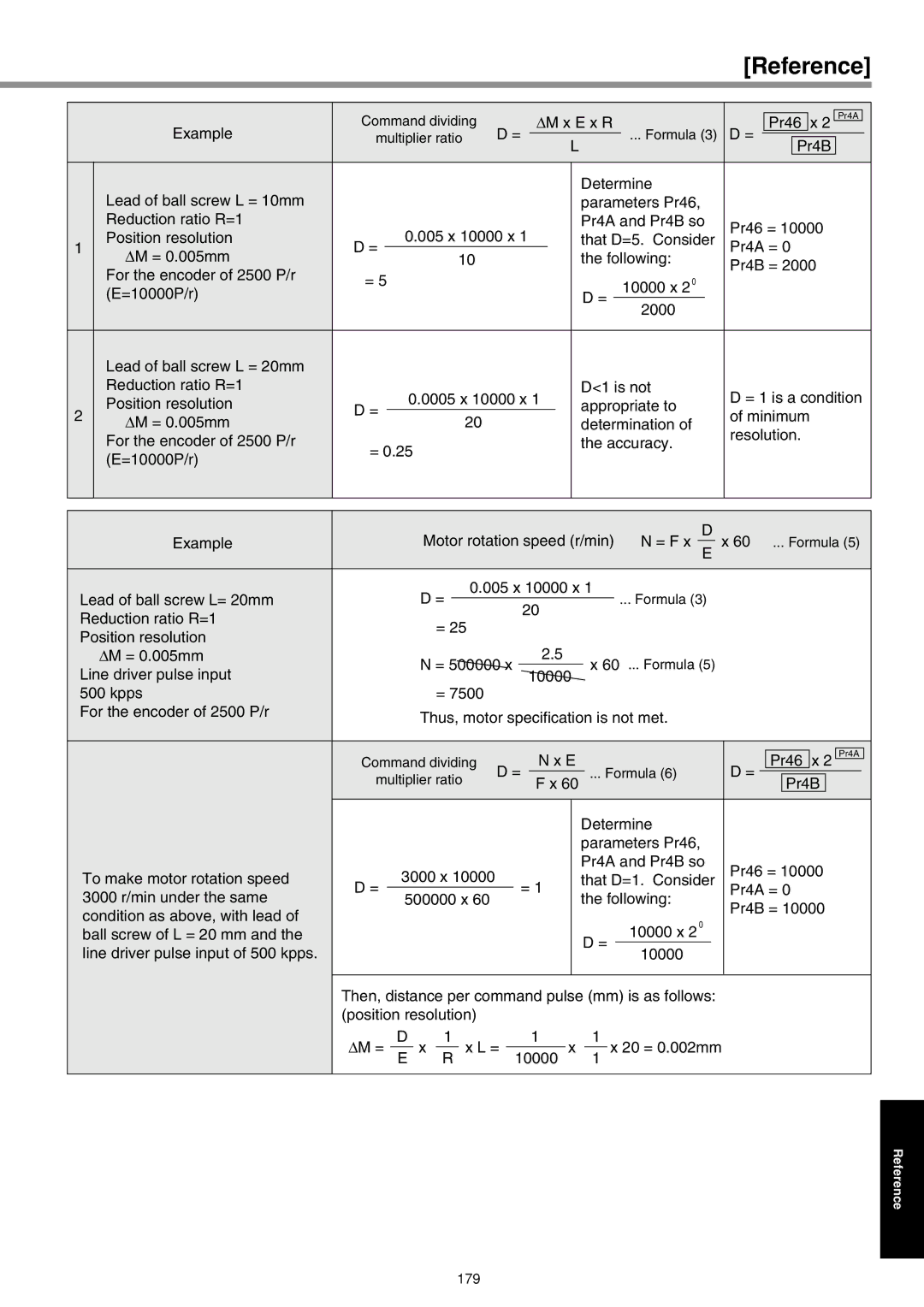
| Example | Command dividing | D = |
| ∆M x E x R |
| ... Formula (3) | D = | Pr46 | x 2 | Pr4A |
|
| ||||||||||||||||||||||||||||
|
|
|
| ||||||||||||||||||||||||||||||||||||||
| multiplier ratio |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||||
|
|
|
|
| L |
|
|
|
|
|
|
|
| Pr4B |
|
|
| ||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| Lead of ball screw L = 10mm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Determine |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| parameters Pr46, |
|
|
|
|
|
|
|
|
|
| ||||||||||||
| Reduction ratio R=1 |
|
|
|
| 0.005 x 10000 x 1 |
|
| Pr4A and Pr4B so | Pr46 = 10000 | |||||||||||||||||||||||||||||||
| Position resolution |
|
|
|
|
|
| that D=5. Consider | |||||||||||||||||||||||||||||||||
1 | D = |
|
|
|
|
| Pr4A = 0 | ||||||||||||||||||||||||||||||||||
∆M = 0.005mm |
|
|
|
|
|
| 10 |
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| the following: |
|
|
|
|
| Pr4B = 2000 | ||||||||||||||||||
| For the encoder of 2500 P/r | = 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 10000 x 2 | 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
| (E=10000P/r) |
|
|
|
|
|
|
|
|
|
|
|
|
|
| D = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 2000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Lead of ball screw L = 20mm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Reduction ratio R=1 |
|
|
|
|
| 0.0005 x 10000 x 1 |
|
|
| D<1 is not |
|
|
|
|
| D = 1 is a condition | ||||||||||||||||||||||||
| Position resolution |
|
|
|
|
|
|
| appropriate to |
|
|
|
|
| |||||||||||||||||||||||||||
2 | ∆M = 0.005mm | D = |
|
| 20 |
|
|
|
|
|
|
|
|
| determination of | of minimum | |||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| resolution. | ||||||||||||||||||||||||
| For the encoder of 2500 P/r | = 0.25 |
|
|
|
|
|
|
|
|
|
|
|
| the accuracy. |
|
|
|
|
| |||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
| (E=10000P/r) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Example |
|
|
|
|
|
| Motor rotation speed (r/min) |
| N = F x |
| D |
| x 60 | ... Formula (5) | ||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
| E | ||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
Lead of ball screw L= 20mm |
|
|
|
|
|
|
|
| 0.005 x 10000 x 1 | ... Formula (3) |
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||
|
|
|
|
|
| D = |
|
|
| 20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
Reduction ratio R=1 |
|
|
|
|
|
|
| = 25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
Position resolution |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
| 2.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||
| ∆M = 0.005mm |
|
|
|
|
|
| N = 500000 x |
|
|
|
| x 60 ... Formula (5) |
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||
Line driver pulse input |
|
|
|
|
|
| 10000 |
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
500 kpps |
|
|
|
|
|
|
| = 7500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
For the encoder of 2500 P/r |
|
|
|
|
|
| Thus, motor specification is not met. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
|
| Command dividing | D = |
| N x E |
|
| ... Formula (6) |
|
|
|
|
| D = |
| Pr46 | x 2 | Pr4A |
| ||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||||||||||||||||
|
| multiplier ratio |
| F x 60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
| Pr4B |
| ||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Determine |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| parameters Pr46, |
|
|
|
|
|
|
|
|
|
| |||||||||||
To make motor rotation speed |
|
|
|
| 3000 x 10000 |
|
|
|
|
|
|
|
|
| Pr4A and Pr4B so | Pr46 = 10000 | |||||||||||||||||||||||||
D = |
|
|
|
| = 1 |
|
|
|
| that D=1. Consider | |||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
| Pr4A = 0 | |||||||||||||||||||||||||||||||||
3000 r/min under the same |
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||||||
|
|
|
| 500000 x 60 |
|
|
|
|
|
|
|
|
| the following: |
|
|
|
|
| Pr4B = 10000 | |||||||||||||||||||||
condition as above, with lead of |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 10000 x 2 0 |
|
|
|
|
|
|
|
|
|
| |||||||
ball screw of L = 20 mm and the |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| D = |
|
|
|
|
|
|
|
|
|
|
| |||||||||||
line driver pulse input of 500 kpps. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 10000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
| Then, distance per command pulse (mm) is as follows: |
|
|
|
|
|
|
|
|
|
| |||||||||||||||||||||||||||||
|
| (position resolution) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||
|
| ∆M = | D |
| x | 1 | x L = |
|
| 1 |
|
| x |
|
| 1 | x 20 = 0.002mm |
|
|
|
|
|
|
|
| ||||||||||||||||
|
| E |
|
|
|
|
|
|
|
| 1 |
|
|
|
|
|
|
|
| ||||||||||||||||||||||
|
|
|
|
|
|
|
| R | 10000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Reference
179