Description on Dividing/Multiplier Ratio
Relation between Positional Resolution/Moving Speed and Command Dividing Multiplier Ratio
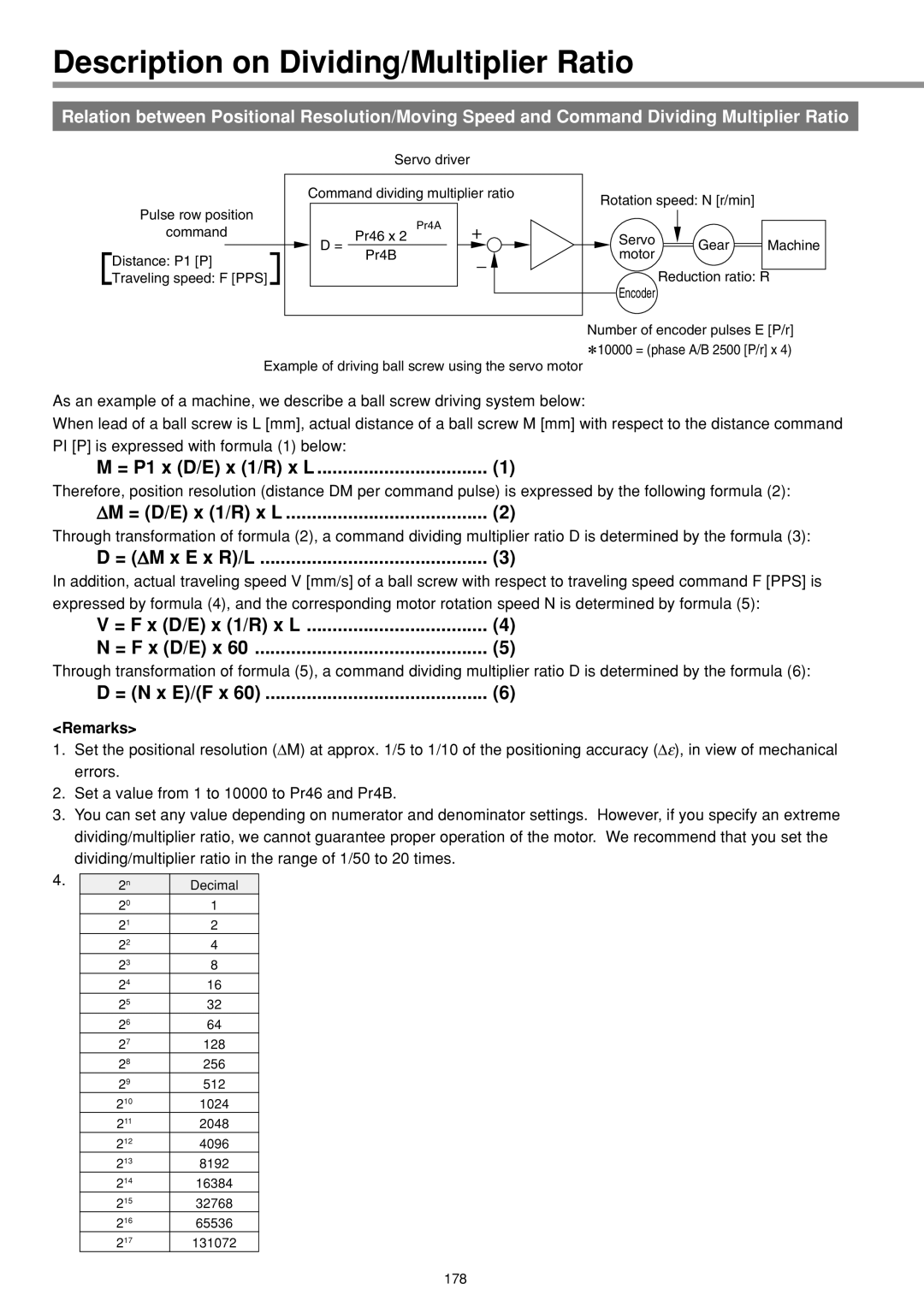
Servo driver
| Command dividing multiplier ratio | Rotation speed: N [r/min] |
| ||||||||||||||||
Pulse row position |
|
|
|
|
|
|
|
|
|
|
| ||||||||
Pr4A |
|
|
|
|
|
|
|
|
| ||||||||||
|
|
|
|
|
|
|
|
| |||||||||||
command |
|
|
|
|
|
|
|
|
| ||||||||||
Pr46 x 2 |
|
| Servo |
|
|
| Gear |
| Machine | ||||||||||
|
|
|
|
|
|
| |||||||||||||
| D = |
|
|
|
|
|
|
|
|
|
|
| motor |
|
|
|
| ||
Distance: P1 [P] | Pr4B |
|
|
|
|
|
| Reduction ratio: R | |||||||||||
|
| ||||||||||||||||||
Traveling speed: F [PPS] |
|
|
|
|
|
|
| Encoder | |||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
| Number of encoder pulses E [P/r] | ||||||||
|
|
|
|
|
|
|
|
|
|
| 10000 = (phase A/B 2500 [P/r] x 4) | ||||||||
| Example of driving ball screw using the servo motor |
|
|
|
|
|
|
|
|
| |||||||||
As an example of a machine, we describe a ball screw driving system below:
When lead of a ball screw is L [mm], actual distance of a ball screw M [mm] with respect to the distance command PI [P] is expressed with formula (1) below:
M = P1 x (D/E) x (1/R) x L | (1) |
Therefore, position resolution (distance DM per command pulse) is expressed by the following formula (2):
∆M = (D/E) x (1/R) x L | (2) |
Through transformation of formula (2), a command dividing multiplier ratio D is determined by the formula (3):
D = (∆M x E x R)/L | (3) |
In addition, actual traveling speed V [mm/s] of a ball screw with respect to traveling speed command F [PPS] is expressed by formula (4), and the corresponding motor rotation speed N is determined by formula (5):
V = F x (D/E) x (1/R) x L | (4) |
N = F x (D/E) x 60 | (5) |
Through transformation of formula (5), a command dividing multiplier ratio D is determined by the formula (6):
D = (N x E)/(F x 60) | (6) |
<Remarks>
1.Set the positional resolution (∆M) at approx. 1/5 to 1/10 of the positioning accuracy (∆ε), in view of mechanical errors.
2.Set a value from 1 to 10000 to Pr46 and Pr4B.
3.You can set any value depending on numerator and denominator settings. However, if you specify an extreme dividing/multiplier ratio, we cannot guarantee proper operation of the motor. We recommend that you set the
dividing/multiplier ratio in the range of 1/50 to 20 times.
4. | 2n | Decimal |
| 20 | 1 |
| 21 | 2 |
| 22 | 4 |
| 23 | 8 |
| 24 | 16 |
| 25 | 32 |
| 26 | 64 |
| 27 | 128 |
| 28 | 256 |
| 29 | 512 |
| 210 | 1024 |
| 211 | 2048 |
| 212 | 4096 |
| 213 | 8192 |
| 214 | 16384 |
| 215 | 32768 |
| 216 | 65536 |
| 217 | 131072 |
178