Communications
command | mode |
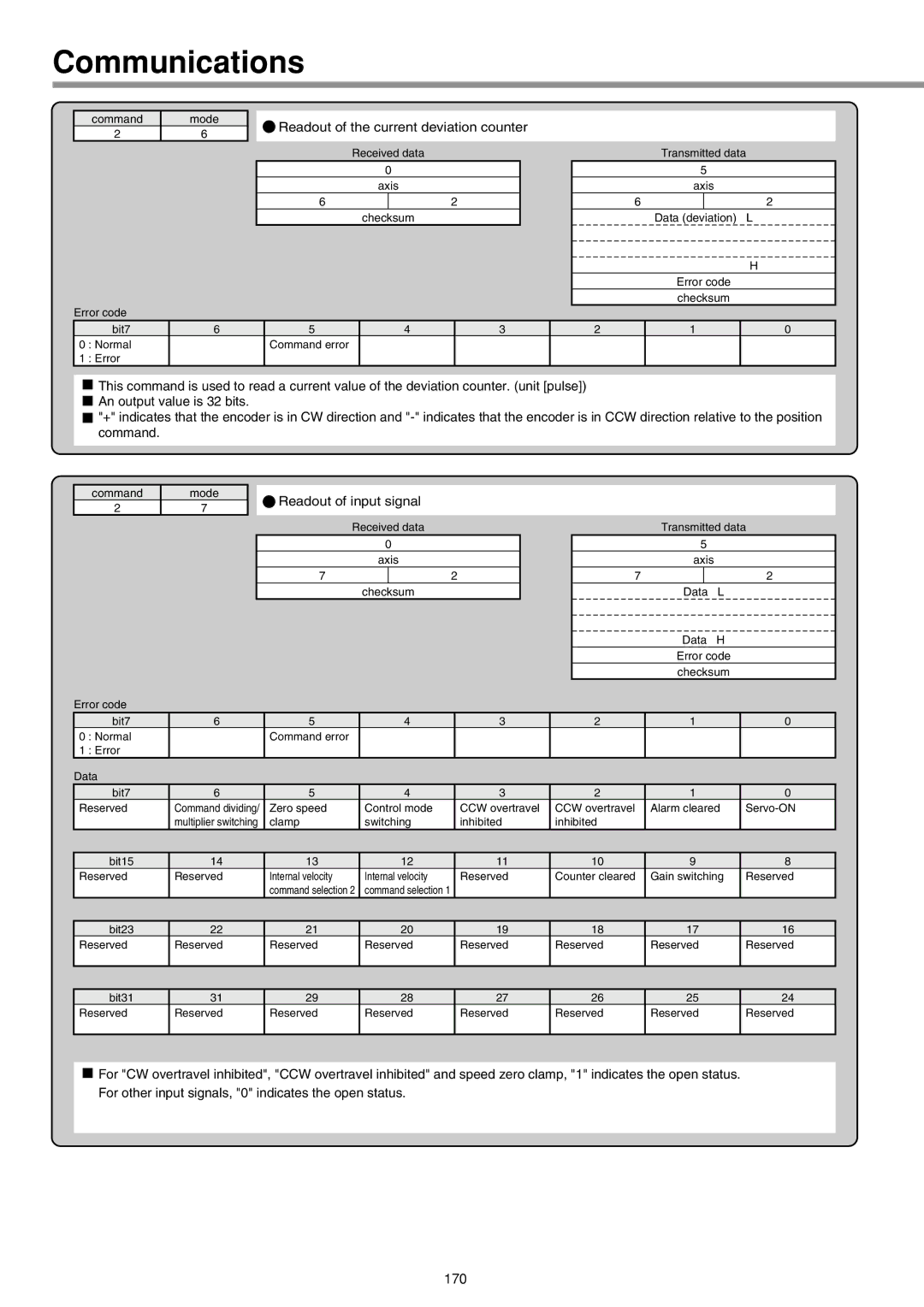
2 | 6 |
Error code
![]() Readout of the current deviation counter
Readout of the current deviation counter
Received data
0
axis
6 | 2 |
checksum
Transmitted data
5
axis
6 | 2 |
Data (deviation) L
H
Error code
checksum
| bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
0 | : Normal |
| Command error |
|
|
|
|
|
1 | : Error |
|
|
|
|
|
|
|
![]() This command is used to read a current value of the deviation counter. (unit [pulse])
This command is used to read a current value of the deviation counter. (unit [pulse])
![]() An output value is 32 bits.
An output value is 32 bits.
![]() "+" indicates that the encoder is in CW direction and
"+" indicates that the encoder is in CW direction and
command | mode |
2 | 7 |
Error code
![]() Readout of input signal
Readout of input signal
Received data
0
axis
7 | 2 |
checksum
Transmitted data
5
axis
7 | 2 |
Data L
Data H
Error code
checksum
bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
0 : Normal |
| Command error |
|
|
|
|
|
1 : Error |
|
|
|
|
|
|
|
Data |
|
|
|
|
|
|
|
bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
Reserved | Command dividing/ | Zero speed | Control mode | CCW overtravel | CCW overtravel | Alarm cleared | |
| multiplier switching | clamp | switching | inhibited | inhibited |
|
|
|
|
|
|
|
|
|
|
bit15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 |
Reserved | Reserved | Internal velocity | Internal velocity | Reserved | Counter cleared | Gain switching | Reserved |
|
| command selection 2 | command selection 1 |
|
|
|
|
|
|
|
|
|
|
|
|
bit23 | 22 | 21 | 20 | 19 | 18 | 17 | 16 |
Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bit31 | 31 | 29 | 28 | 27 | 26 | 25 | 24 |
Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved | Reserved |
|
|
|
|
|
|
|
|
![]() For "CW overtravel inhibited", "CCW overtravel inhibited" and speed zero clamp, "1" indicates the open status. For other input signals, "0" indicates the open status.
For "CW overtravel inhibited", "CCW overtravel inhibited" and speed zero clamp, "1" indicates the open status. For other input signals, "0" indicates the open status.