Communications
List of Communications Commands
command | mode | Description | |
|
| NOP | |
0 | 1 | Readout of CPU version | |
5 | Readout of the driver model name | ||
| |||
| 6 | Readout of the motor model name | |
1 |
| INIT | |
1 | Setting of protocol parameters | ||
| |||
|
| POS, STATUS, I/O | |
| 0 | Readout of status | |
| 1 | Readout of the command pulse counter | |
| 2 | Readout of the feedback pulse counter | |
2 | 4 | Readout of current speed | |
5 | Readout of current torque output | ||
| 6 | Readout of the current deviation counter | |
| 7 | Readout of input signal | |
| 8 | Readout of output signal | |
| 9 | Readout of current speed/torque/deviation counter | |
| A | Readout of status/input signal/output signal | |
|
| PARAMETER | |
8 | 0 | Individual readout of parameters | |
1 | Individual writing of parameters | ||
| |||
| 4 | Writing of parameters to EEPROM | |
|
| ALARM | |
| 0 | Readout of current alarm data | |
9 | 1 | Individual readout of alarm history | |
2 | Batch readout of alarm history | ||
| |||
| 3 | Alarm history clear (also on EEPROM) | |
| 4 | Alarm clear | |
|
| PARAMETER | |
B | 0 | Individual readout of user parameters | |
1 | Page readout of user parameters | ||
| |||
| 2 | Page writing of user parameters |
<Note>
Be sure to use the above commands only. We could not guarantee proper operation of the driver when you
transmit a command not listed above.
Details on Communications Commands
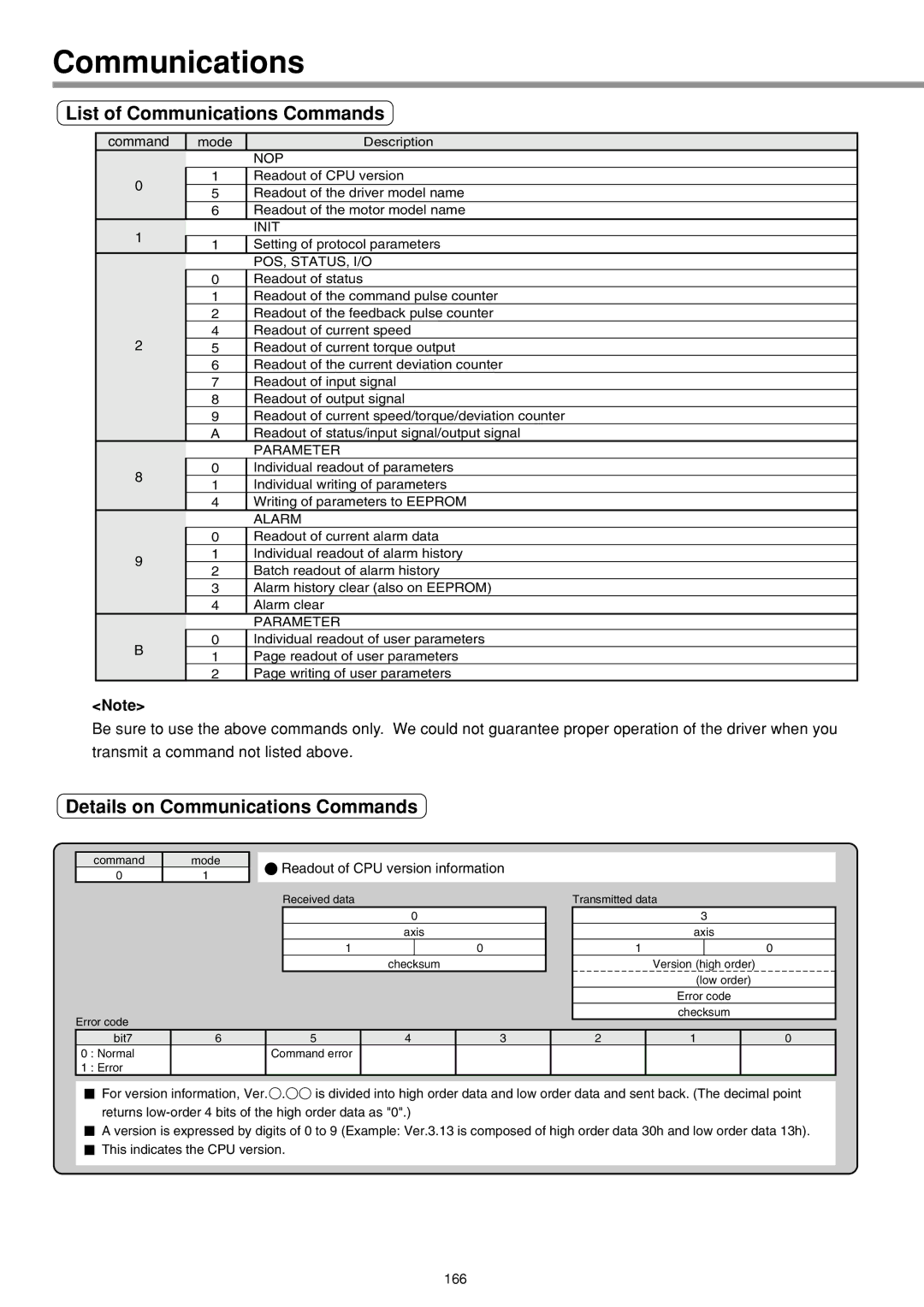
command | mode |
0 | 1 |
Error code
 Readout of CPU version information
Readout of CPU version information
Received data
0
axis
1 | 0 |
checksum
Transmitted data
3
axis
1 | 0 |
Version (high order) (low order)
Error code
checksum
| bit7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
0 | : Normal |
| Command error |
|
|
|
|
|
1 | : Error |
|
|
|
|
|
|
|
For version information, Ver.![]()
![]() is divided into high order data and low order data and sent back. (The decimal point returns
is divided into high order data and low order data and sent back. (The decimal point returns
A version is expressed by digits of 0 to 9 (Example: Ver.3.13 is composed of high order data 30h and low order data 13h). This indicates the CPU version.
166