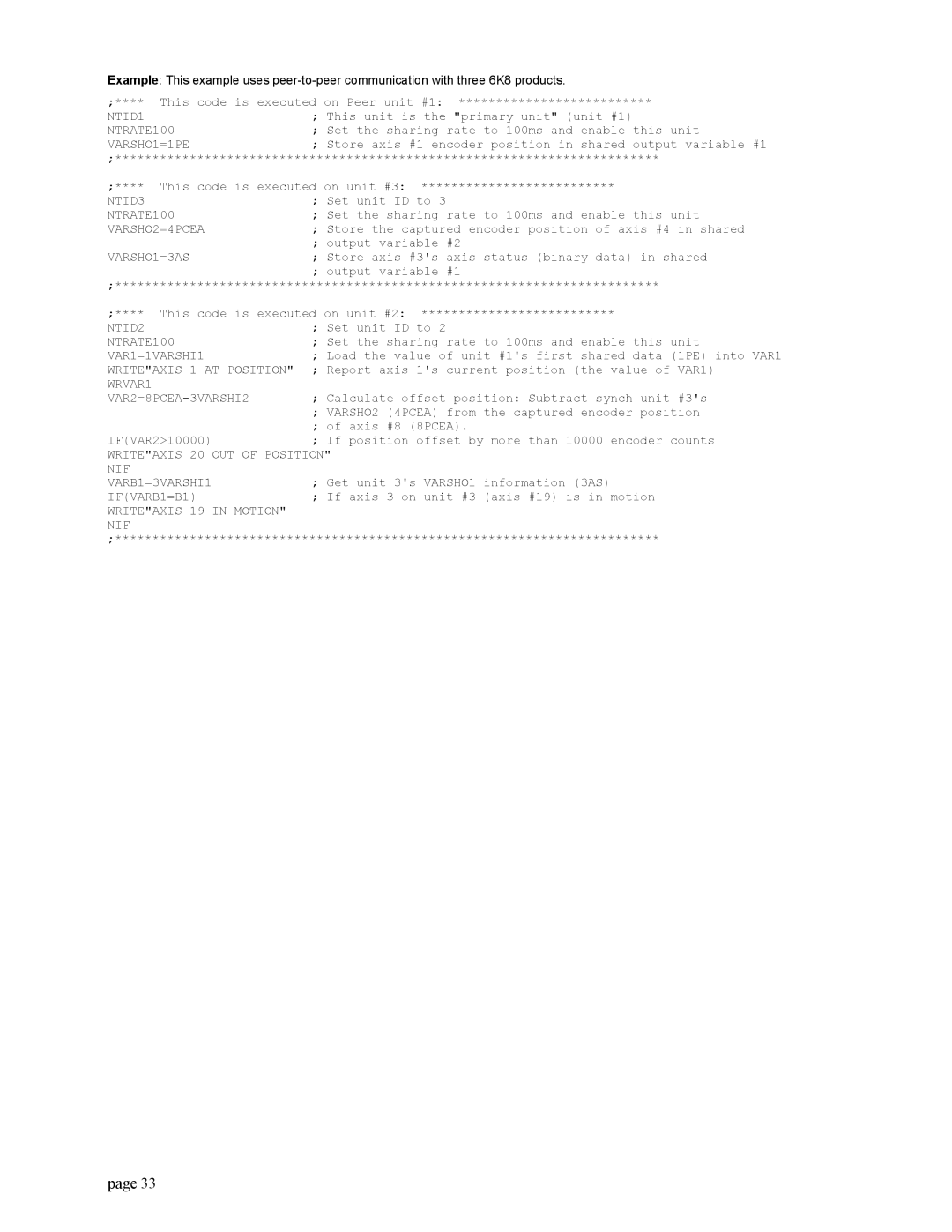
Example: This example uses
;**** | This code is executed on Peer unit #1: | ************************** | |
NTID1 |
| ; This unit is the "primary unit" (unit #1) | |
NTRATE100 | ; Set the sharing | rate to 100ms and enable this unit | |
VARSHO1=1PE | ; Store axis #1 encoder position in shared output variable #1 | ||
;************************************************************************* | |||
;**** | This code is executed on unit #3: ************************** | ||
NTID3 |
| ; Set unit ID to 3 | rate to 100ms and enable this unit |
NTRATE100 | ; Set the sharing | ||
VARSHO2=4PCEA | ; Store the captured encoder position of axis #4 in shared | ||
VARSHO1=3AS | ; output variable | #2 | |
; Store axis #3's | axis status (binary data) in shared | ||
;output variable #1
;*************************************************************************
;**** This code is executed on unit #2: **************************
NTID2 | ; Set unit ID to 2 |
NTRATE100 | ; Set the sharing rate to 100ms and enable this unit |
VAR1=1VARSHI1 | ; Load the value of unit #1's first shared data (1PE) into VAR1 |
WRITE"AXIS 1 AT POSITION" ; Report axis 1's current position (the value of VAR1) | |
WRVAR1 | ; Calculate offset position: Subtract synch unit #3's |
| |
| ; VARSHO2 (4PCEA) from the captured encoder position |
IF(VAR2>10000) | ; of axis #8 (8PCEA). |
; If position offset by more than 10000 encoder counts | |
WRITE"AXIS 20 OUT OF POSITION" | |
NIF | ; Get unit 3's VARSHO1 information (3AS) |
VARB1=3VARSHI1 | |
IF(VARB1=B1) | ; If axis 3 on unit #3 (axis #19) is in motion |
WRITE"AXIS 19 IN MOTION" |
|
NIF |
|
;*************************************************************************
page 33