19
This function should be activated whenever the rated current AND the peak current of the motor are less than 20% of the amplifier rated continuous and peak limits respectively.
Sometimes, oscillations may occur in the current loop due to the fact that the feedback gain was multiplied. This can be resolved by substituting R4 with a lower value.
4.3 Digital current limits
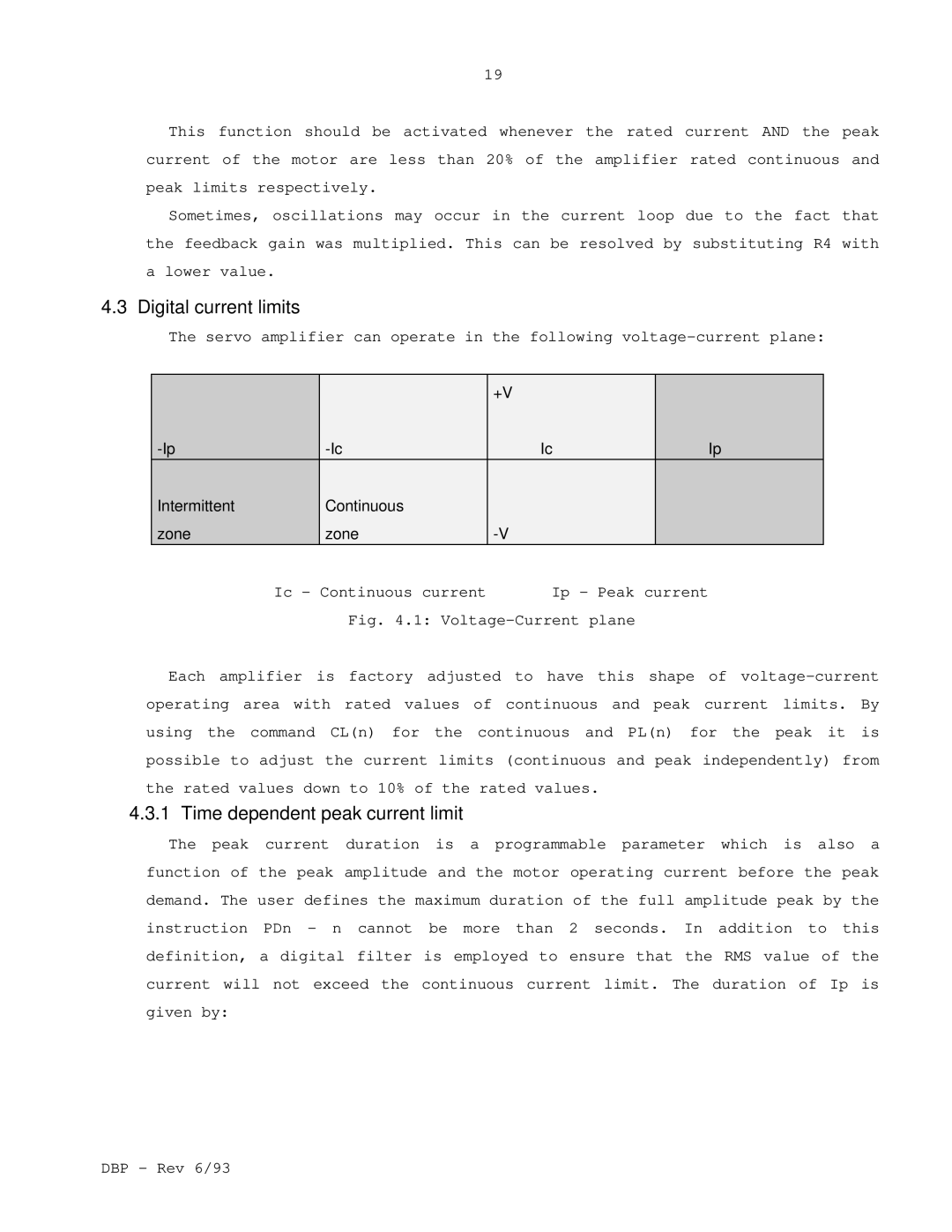
The servo amplifier can operate in the following
|
|
| +V |
|
|
| Ic |
| Ip | ||
Intermittent |
| Continuous |
|
|
|
zone |
| zone |
|
| |
| Ic - Continuous current | Ip - Peak current |
| ||
|
| Fig. 4.1: |
| ||
Each amplifier is factory adjusted to have this shape of
4.3.1Time dependent peak current limit
The peak current duration is a programmable parameter which is also a function of the peak amplitude and the motor operating current before the peak demand. The user defines the maximum duration of the full amplitude peak by the instruction PDn - n cannot be more than 2 seconds. In addition to this definition, a digital filter is employed to ensure that the RMS value of the current will not exceed the continuous current limit. The duration of Ip is given by:
DBP - Rev 6/93