Theory of Device Operation
a)
b)
c)
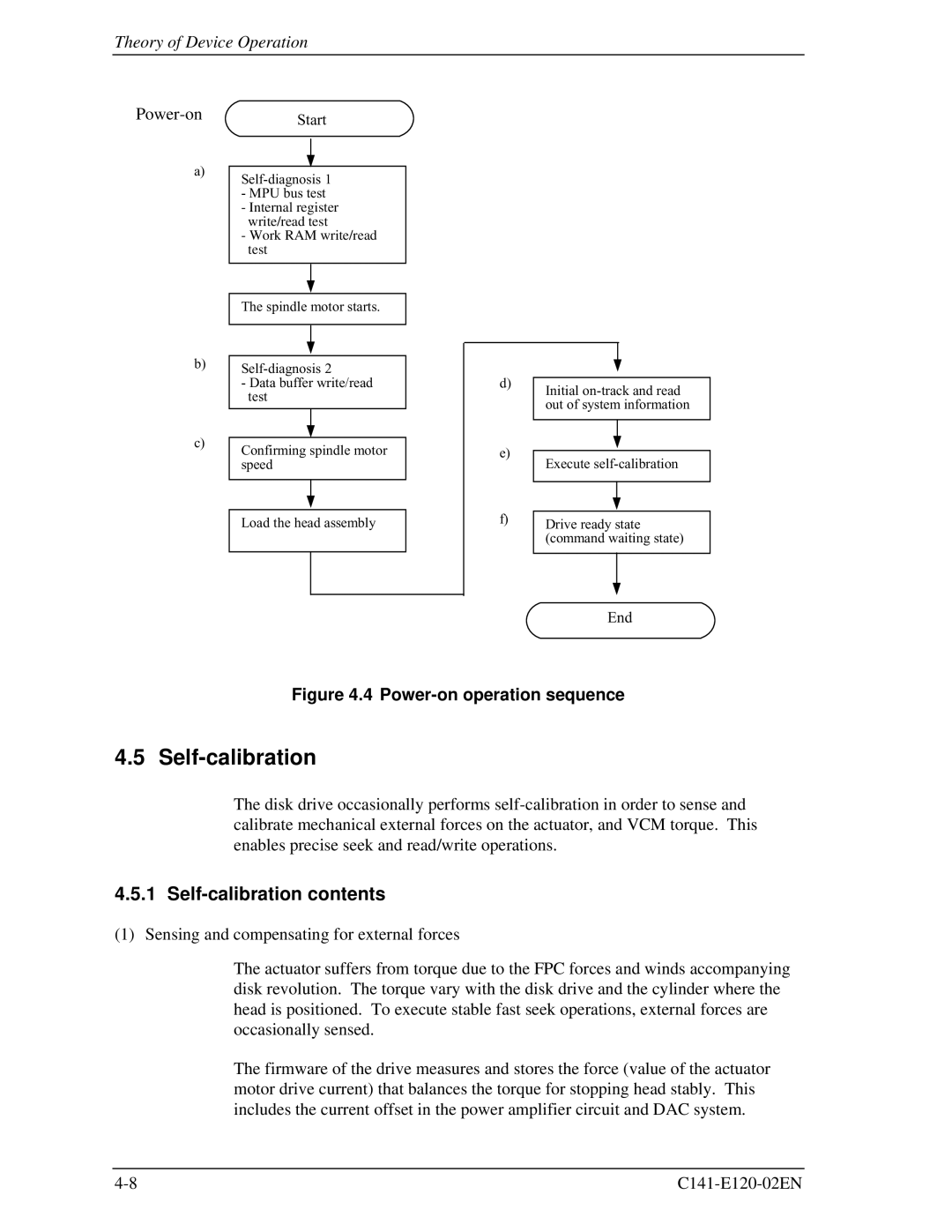
-MPU bus test
-Internal register write/read test
-Work RAM write/read test
The spindle motor starts.
-Data buffer write/read test
Confirming spindle motor speed
Load the head assembly
d)Initial
e)
Execute
f)Drive ready state (command waiting state)
End
Figure 4.4 Power-on operation sequence
4.5 Self-calibration
The disk drive occasionally performs
4.5.1 Self-calibration contents
(1) Sensing and compensating for external forces
The actuator suffers from torque due to the FPC forces and winds accompanying disk revolution. The torque vary with the disk drive and the cylinder where the head is positioned. To execute stable fast seek operations, external forces are occasionally sensed.
The firmware of the drive measures and stores the force (value of the actuator motor drive current) that balances the torque for stopping head stably. This includes the current offset in the power amplifier circuit and DAC system.