Tipo a cassetta con scarico daria a 1 vie
MMU-AP0071YH,RBC-UY135PGMMU-AP0091YH MMU-AP0121YH
Modelo de casete de distribución de aire de 1 vías
Descarga de ar tipo cassete de 1 vias
HFC R410A R22
Adoption of NEW Refrigerant
Sommaire
Separate sold parts
Refrigerant piping
Part name
Shape Usage
New Refrigerant Air Conditioner Installation
Precautions for Safety
To Disconnect the Appliance from Main Power Supply
Connect the connecting wire correctly
Inappropriate grounding may cause electric shock
Precautions for Safety
Installation space
Selection of Installation Place
Selection of Installation Place
Installation of Indoor Unit
Case of wireless type
Removal of transporting rubbers
External view
Wired remote controller RBC-AMT21E
Ceiling opening and installation of hanging bolts
Installation of Indoor Unit
How to use the attached installation pattern
Installation of hanging bolts
Installation of ceiling panel Sold separately
Installation of indoor unit
Pipe material/Insulator and size
Drain Piping Work
Connection of drain pipe
Drain up
When the electric work has finished
Heat insulating of pipe connecting part
When the electric work has not finished
Check the draining
Refrigerant Piping
Piping material and dimensions
Permissible pipe length and permissible height difference
Pipe forming/End positioning
Airtight test/Air purge, etc
Connection of refrigerant pipe
Open fully valves of the outdoor unit Gas leak check
Heat insulating process
Electric Work
Be sure to connect earth wire. Grounding work
Be sure to install an earth leakage breaker
Indoor unit power supply
Power supply specifications
Indoor/Outdoor inter-unit wiring, Central controller wiring
Remote controller wiring
How to remove cover of the electric parts box
Treating of wiring connecting port
Electric Work
Cable connection
Wiring between indoor and outdoor units
Remote controller wiring
Address setup
Wiring on the ceiling panel
Basic operation procedure for setup exchange
Exchange of applicable control setup
Applicable Controls
Notification
Group control
Change of lighting term of filter sign
To secure better effect of heating
Case of wired remote controller
How to execute test operation
Test RUN
Before test operation
Procedure
Case of wireless remote controller
Confirmation and check
Troubleshooting
Confirmation of error history
Terminology
Check code list
Check method
Troubleshooting
TCC-LINK Toshiba Carriea Cominication Link
Error detected by TCC-LINK central control device
Display on sensor part of wireless
Display on wired remote controller
New check code
Special mention
Daily maintenance
Maintenance
Cleaning of air filter
Way Air Discharge Cassette Compact Type
Piè ces vendues sé paré ment
Tuyaux de ré frigé rant
Pour dé connecter l’appareil du secteur
Mesures DE Securite
Avertissement
Ré servé
Mesures DE Securite
Espace requis pour l’installation
Selection DU Lieu D’INSTALLATION
Selection DU Lieu D’INSTALLATION
Installation DE L’UNITE Interieure
Enlè vement des caoutchoucs de transport
Sur les types sans-fil
100 850 400 200 120 140 235 Métal de support
Vue exté rieure
Installation du boulon de suspension
Installation DE L’UNITE Interieure
Installation de la té lé commande vendue sé paré ment
Comment utiliser le gabarit de montage joint
Fixez solidement
Installation de l’unité inté rieure
Installation du panneau pour plafond vendu sé paré ment
Raccordement du tuyau d’é vacuation
Tuyauterie/Isolant et dimension
Evacuation ascendante
Tuyauterie
Lorsque l’installation é lectrique n’est pas terminé e
Lorsque l’installation é lectrique est terminé e
Vé rification de l’é vacuation
Isolation thermique des raccords des tuyaux
Tuyaux DE RÉ Frigé Rant
Tuyauterie et dimensions
Mise en forme/Pose définitive des tuyaux
Evasement
Test d’é tanché ité /Purge d’air, etc
Raccordement du tuyau de ré frigé rant
Procé dé de calorifugeage
Marge de projection de l’é vasement B Unité mm
Assurez-vous de raccorder le fil de terre. Mise à la terre
Travaux D’É Lectricité
Alimentation é lectrique de l’unité inté rieure
Câ bles de la té lé commande *4
Caracté ristiques de l’alimentation é lectrique
Raccordement des câ bles
Travaux D’É Lectricité
Comment dé monter le couvercle du boîtier é lectrique
Traitement des ports de connexion des câ bles
Configuration de l’adresse
Raccordement des té lé commandes
Raccordement sur le panneau de plafond
Sché ma de câ blage
Procé dure de base pour modifier la configuration
Commandes Utilisables
Modification de la configuration de la commande possible
Pour garantir un meilleur chauffage
Commande de groupe
En cas de té lé commande avec fil
Mode d’exé cution d’un essai de fonctionnement
Essai DE Fonctionnement
Remarque
Petite vis
Avec une té lé commande sans-fil
Récepteur Entretoise Vis M4 × 25 2 pièces Encoche
Confirmation et vé rification
DÉ Pannage
Confirmation de l’historique de pannes
Mé thode de vé rification
Terminologie
Liste des codes de vé rification
MG-SW
DÉ Pannage
IPDU, I/F
Affichage sur capteur té lé commande sans-fil
Affichage sur té lé commande à fil
Nouveau code de vé rification
Mention spé ciale
Entretien quotidien
Entretien
Type compact cassette à 1 voie de refoulement de l’air
Nettoyage du filtre à air
Kühlmittel-Leitungssystem
Getrennt erhältliche Teile
Vorsicht Trennen des Gerä ts von der Hauptstromversorgung
Sicherheitsvorkehrungen
Warnung
Sicherheitsvorkehrungen
Platzbedarf
Auswahl DES Aufstellungsortes
Vorsicht
Auswahl DES Aufstellungsortes
Installation DER Raumeinheit
Ausbau der Transportsicherungen
Fü r drahtlose Fernbedienungen
Gerä teansicht
Benutzung der Installationsvorlage
Installation DER Raumeinheit
Installation der Aufhä ngebolzen
Installation der Fernbedienung getrennt erhä ltlich
Installation der Deckenkassette gesondert zu kaufen
Installation der Inneneinheit
Kondenswasserablauf nach oben
Rohrmaterial/Isolation und Abmessung
Anschluss des Kondensatschlauchs
Wenn die Elektroinstallation noch nicht fertiggestellt ist
Nach Fertigstellung der Elektroinstallation
Ablauf ü berprü fen
Wä rmeisolierung der Rohrverbindungen
Erlaubte Rohrleitungslä ngen und erlaubte Hö hendifferenzen
KÜ Hlmittelleitungen
Rohrmaterial und Abmessungen
Biegen und Positionieren
Dichtetest/Entlü ftung usw
Anschluss der Kü hlmittelleitung
Wä rmeisolierung
Bö rdelhö he B Einheit mm Starr Kupplung
Verlegen Sie auch eine Masseleitung. Masse anschließen
Elektroarbeiten
Verkabelung der Fernbedienung
Spezifikation der Stromversorgung
Stromversorgung Raumeinheit
Kabelanschlü sse
Elektroarbeiten
Ffnen der Abdeckung des Schaltkastens
Abdichtung der Kabeldurchfü hrung
Verbindungskabel zwischen Raum- und Außeneinheit
Verkabelung der Fernbedienung
Adress-Einstellung
Verkabelung des Deckenrahmens
Hinweise
Steuerungsmö Glichkeiten
Nderung der Steuerungsvorgaben
Automatische Adressierung
Verbesserung der Heizleistung
Nderung der Zeitvorgabe fü r die Filterwarnleuchte
Gruppensteuerung
Für den Code in Vorgehensweise 3 geben Sie 01 ein
Hinweis
Testlauf
Vorbereitung
Ablauf des Tests
Beschreibung
Testlauf
Infrarot-Fernbedienung
Bestä tigung und Prü fung
Fehlersuche
Aufruf des Fehlerspeichers
Prü fmethode
AI-NET
Liste der Fehlercodes
Fehlersuche
TCC-LINK Toshiba Carrier Communication Link
Fehler durch zentrale Ü berwachung TCC-LINK erkannt
Anzeige bei verdrahteter Fernbedienung
Neuer Prü fcode
Anzeige auf Empfangsteil der Infrarot-Fernbedienung
Spezielle Bemerkung
Wege-Kassetten-Kompakt-Modell
Wartung
Tä gliche Wartung Reinigen des Luftfilters
Wird auf der Fernbedienung
Tubazioni del refrigerante
Parti da acquistare a parte
Nome delle parti Forma Utilizzo
Nome delle parti Forma
Avvertenza
Precauzioni PER LA Sicurezza
Ttenzione
Collegare il cavo di connessione in modo corretto
Una messa a terra non corretta può causare scosse elettriche
Precauzioni PER LA Sicurezza
Evitare l’installazione nei posti seguenti
Scelta DEL Posto D’INSTALLAZIONE
Spazio per l’installazione
Scelta DEL Posto D’INSTALLAZIONE
Installazione DELL’UNITÀ Interna
Rimozione dei gommini di protezione durante il trasporto
Nel caso del tipo via radio
Telecomando via cavo RBC-AMT21E
Vista esterna
Come usare la sagomo per installazione fornita in dotazione
Installazione DELL’UNITÀ Interna
Installazione del bullone di sospensione
Installazione del pannello del soffitto in vendita a parte
Fissare saldamente
Installazione dellunità interna
Materiale per tubazioni/Isolamento e formato
Lavoro PER Tubazione DI Scarico
Connessione del tubo di scarico
Scarico
Se i collegamenti elettrici non sono stati completati
Controllare lo scarico
Se i collegamenti elettrici sono stati completati
Dimensione misuratore dia. svasatura a Unità mm
Materiale per tubature e dimensioni
Tubazioni DEL Refrigerante
Formatura tubi/Posizionamento estremità
Prove di tenuta d’aria/Sfiato aria, ecc
Connessione del tubo del refrigerante
Procedura per isolamento termico
Imperial Tipo con dado ad alette
Collegamenti Elettrici
Installare un interruttore di collegamento a terra
Collegamenti elettrici del telecomando
Dati tecnici per alimentazione elettrica
Alimentazione elettrica dell’unità interna
Come trattare la porta di connessione fili
Collegamenti Elettrici
Collegamento dei cavi
Posa in opera dei cavi per il telecomando
Schema dei collegamenti elettrici
Collegamenti elettrici fra unità interna e esterna
Impostazione dindirizzamento
Avviso
Comandi Applicabili
Scambio di impostazioni dei comandi applicabili
Indirizzamento automatico
Per garantire una resa migliore del riscaldamento
Modifica del tempo di accensione del simbolo del filtro
Controllo di gruppo
Per il codice di voce del passo 3 , specificare
Nota
Funzionamento DI Prova
Prima del funzionamento di prova
Come avviare il funzionamento di prova
Caso di telecomando via radio
Conferma della casistica di errori
Risoluzione DEI Problemi
Conferma e controllo
Metodo di controllo
Terminologia
Lista dei codici di controllo
101
Risoluzione DEI Problemi
102
Differenza tra codice di controllo nuovo e sistema corrente
Nuovo codice di controllo
Display su telecomando via cavo
Display su parte sensore di telecomando via radio
Manutenzione giornaliera
Manutenzione
Tipo compatto a cassetta con scarico daria a 1 via
Pulizia del filtro dellaria
Tubería de refrigerante
Componentes vendidos por separado
Nombre del componente Cantidad Forma Utilización
Nombre del componente Cantidad Forma
Precaució N
Precauciones Para SU Seguridad
Advertencia
Conecte el cable de conexió n correctamente
Precauciones Para SU Seguridad
Evite la instalació n en los siguientes lugares
Selecció N DEL Lugar DE Instalació N
Espacio de instalació n
En el caso de mando a inalá mbrico
Instalació N DE LA Unidad Interior
Selecció N DEL Lugar DE Instalació N
Vista exterior
Có mo utilizar el patró n de instalació n adjunto
Instalació N DE LA Unidad Interior
Instalació n del perno de suspensió n
Instalació n del mando a distancia vendido por separado
Instalació n del panel de techo vendido por separado
Instalació n de la unidad interior
Material del tubo / Aislante y tamañ o
Canalizació N DE Drenaje
Conexió n del tubo de drenaje
Drenaje ascendente
Aislamiento té rmico de la parte de conexió n de los tubos
Compruebe el drenaje
Una vez preparada la canalización de drenaje
Si ya se ha completado la instalació n elé ctrica
Tubería DE Regrigerante
Material y dimensiones de la tubería
Longitud del tubo y diferencia de altura permisibles
Moldeado de los tubos / Posició n final
Prueba de hermetizado, purga de aire, etc
Conexió n del tubo de refrigerante
Proceso de aislamiento té rmico
Margen de proyecció n en el abocinado B unidad mm
Instale un disyuntor de fugas a tierra
Instalació N ELÉ Ctrica
Asegú rese de conectar todos los cables. Conexió n a tierra
Cableado del mando a distancia
Especificaciones de la alimentació n elé ctrica
Alimentació n elé ctrica de la unidad interior
Conexió n de los cables
Instalació N ELÉ Ctrica
Có mo extraer la tapa del cuadro elé ctrico
Tratamiento del orificio de conexió n del cableado
Diagrama del cableado
Configuració n de las identificaciones
Cableado del mando a distancia
Cableado entre las unidades interior y exterior
Notificació N
Cambio en la configuració n de los controles aplicables
Controles Aplicables
Cambiar momento de encendido de la señ al de filtro
Configuració n De la señ al de filtro 0000 Ninguno 0001
Para mejorar el efecto calefactor
Control grupal
Antes de llevar a cabo la prueba
Prueba DE Funcionamiento
Có mo realizar una prueba de funcionamiento
En el caso de mando a distancia con cable
Tornillo pequeño
En el caso de mando a distancia inalá mbrico
Confirmació n del historial de errores
Resolució N DE Problemas
Confirmació n y verificació n
Mé todo de verificació n
Terminología
Lista de có digos de verificació n
127
Resolució N DE Problemas
128
Nuevo có digo de verificació n
Modelo compacto de cassette con descarga de aire de 1 vía
Mantenimiento
Mantenimiento diario Limpieza del filtro de aire
Desaparecerá el mensaje
Tubagem de refrigerante
Peç as vendidas em separado
Nome da peça Quant Forma Utilização
Nome da peça Quant Forma
Precauçõ ES
Precauçõ ES DE Seguranç a
Aviso
Instalaçã o de Ar Condicionado de Novo Refrigerante
133
Cuidado
Selecçã O do Local DE Instalaçã O
Espaç o de instalaçã o
Evite instalar a unidade nos seguintes locais
Selecçã O do Local DE Instalaçã O
Instalaçã O DA Unidade Interior
Remoçã o das borrachas de transporte
No caso do tipo sem cabos
136
Abertura do tecto e instalaçã o de parafusos de suspensã o
Instalaçã O DA Unidade Interior
Como utilizar o esquema de instalaçã o fornecido
Instalaçã o de parafuso de suspensã o
Fixe firmemente
Instalaçã o da unidade interior
Instalaçã o do painel de tecto vendido separadamente
Ligaçã o do tubo de drenagem
Material dos tubos/Isolante e tamanho
Drenagem ascendente
Material
Isolamento té rmico da peç a de ligaçã o do tubo
Verificar a drenagem
Depois de concluídos os trabalhos de electricidade
Antes de concluídos os trabalhos de electricidade
Material e dimensõ es de tubagem
Tubagem DE Refrigerante
Definiçã o da Tubagem Posiçã o dos Extremos
Alargamento
Teste de hermeticidade/Purga de ar, etc
Ligaçã o do tubo de refrigerante
Processo de isolamento té rmico
Margem de projecçã o no alargamento B Unidade mm
Nã o se esqueç a de ligar o cabo de terra. Ligaçã o à terra
Trabalhos DE Electricidade
Cabos do controlador remoto
Especificaçõ es da alimentaçã o elé ctrica
Alimentaçã o elé ctrica da unidade interior
Ligaçã o de cabos
Trabalhos DE Electricidade
Como remover a cobertura da caixa das partes elé ctricas
Tratamento da porta de ligaçã o dos cabos
Ligaçõ es do controlador remoto
Diagrama de ligaçõ es
Ligaçõ es entre as unidades interiores e exteriores
Definiçã o do endereç o
Controlos Aplicá Veis
Troca da configuraçã o de controlo aplicá vel
Endereç amento automá tico
Descriçã o
Mude o tempo de iluminaçã o do sinal do filtro
Configuraçã o
Para garantir um melhor efeito do aquecimento
Controlo de grupo
Avisos
Teste DE Funcionamento
Antes do teste de funcionamento
Como efectuar um teste
Procedimento
No caso de controlador remoto sem cabos
Parafuso pequeno
Confirmaçã o e verificaçã o
Resoluçã O DE Problemas
Confirmaçã o de historial de erros
Mé todo de Verificaçã o
Lista de có digos de erros
153
Resoluçã O DE Problemas
Erro detectado pelo dispositivo de controlo central TCC-LINK
Visor no controlador remoto com cabos
Novo có digo de verificaçã o
Visor na parte do sensor sem cabos
Referê ncia especial
Tipo Cassete compacta de Descarga de Ar de 1 vias
Manutençã O
Aparecer no controlador remoto, deve proceder
Refrigeraçã o/aquecimento
Koelmiddelleidingen
Niet meegeleverde onderdelen
LET OP
Installeren van een airconditioner met een nieuw koelmiddel
Waarschuwing
Het apparaat loskoppelen van de netvoeding
Voorzorgsmaatregelen Voor UW Veiligheid
Installeer de airconditioner niet op de volgende plaatsen
Installatieruimte
Keuze VAN DE Locatie Voor DE Installatie
Installatie VAN DE Binnenunit
Verwijdering van de transportrubbers
Bij een draadloos model
Bekabelde afstandsbediening RBC-AMT21E
Buitenaanzicht
Zo gebruikt u het meegeleverde installatiesjabloon
Installatie VAN DE Binnenunit
Aanbrengen van de plafondopening en de ophangbouten
Monteren van de ophangbouten
Montage van het plafondpaneel niet meegeleverd
Installatie van de binnenunit
Leidingmateriaal/isolatie en afmeting
Afvoerleidingen
Aansluiten van de afvoerleiding
Stijgleiding
Warmte-isolatie van de pijpaansluiting
Controleer de afvoer
Wanneer de elektrische bekabeling is aangesloten
Wanneer de elektrische bekabeling niet is aangesloten
Toegestane leidinglengte en hoogteverschil
Koelmiddelleidingen
Leidingmateriaal en -afmetingen
Leidingen buigen Bepalen van het uiteinde van de leidingen
Gasdichtheid testen Ontluchten enzovoort
Aansluiten van koelmiddelleidingen
Isoleren
Uitstekende leidinglengte bij trompen B eenheid mm
Controleer of de aardingsaansluiting is gemonteerd. Aarding
Installeer altijd een aardlekschakelaar
Elektrische Bedrading
Bekabeling voor de afstandsbediening
Voedingspecificaties
Voeding binnenunit
Behandeling van de aansluitopening voor de bedrading
Elektrische Bedrading
Kabelaansluitingen
Bekabeling van de afstandsbediening
Aansluitschema
Bekabeling tussen de binnen- en buitenunits
Adres instellen
Belangrijk
Bedieningselementen
Wijzigen van de instellingen
Automatische adressering
Tijdstip waarop de
De verwarmingscapaciteit optimaliseren
Groepsbediening
Opmerking
Werkingstest
Voordat u een werkingstest uitvoert
Zo voert u de werkingstest uit
Bij gebruik van een draadloze afstandsbediening
Controles
Storingen Verhelpen
Storingscodes opslaan
Controlemethode
Hulpcode
Storingscodelijst
179
Storingen Verhelpen
180
Nieuwe storingscode
Dagelijks onderhoud
Onderhoud
Compact model voor inbouw in plafond met 1 uitblaasopening
Het luchtfilter reinigen
Óùëçíþóåéò øõêôéêïý ìÝóïõ
ÅîáñôÞìáôá ðïõ ðùëïýíôáé îå÷ùñéóôÜ
Ðñïöõëáîåéó Áóöáëåéáó
Ðñïöõëáîåéó Áóöáëåéáó
×þñïò åãêáôÜóôáóçò
Åðéëïãç ÔÏÕ ×ÙÑÏÕ Åãêáôáóôáóçó
Ãéá ôçí ðåñßðôùóç áóýñìáôïõ ôýðïõ
Áöáßñåóç ëÜóôé÷ùí ìåôáöïñÜò
ÅîùôåñéêÞ üøç
395
Ðþò íá ÷ñçóéìïðïéÞóåôå ôï ðñïóáñôçìÝíï ðñüôõðï åãêáôÜóôáóçò
¢íïéãìá ïñïöÞò êáé åãêáôÜóôáóç ôùí ìðïõëïíéþí áíÜñôçóçò
ÅãêáôÜóôáóç ôïõ ìðïõëïíéïý áíÜñôçóçò
ÅãêáôÜóôáóç ôïõ ôçëå÷åéñéóôçñßïõ Ðùëåßôáé îå÷ùñéóôÜ
‹Ù˘ÎÂıÒ‹ÙÔı
ÅãêáôÜóôáóç ôçò åóùôåñéêÞò ìïíÜäáò
ÅãêáôÜóôáóç ôïõ öáôíþìáôïò ïñïöÞò
Ðùëåßôáé îå÷ùñéóôÜ
ÁðïóôñÜããéóç
Óýíäåóç óùëÞíá áðïóôñÜããéóçò
¸ Ô ı
¸ëåã÷ïò ôçò áðïóôñÜããéóçò
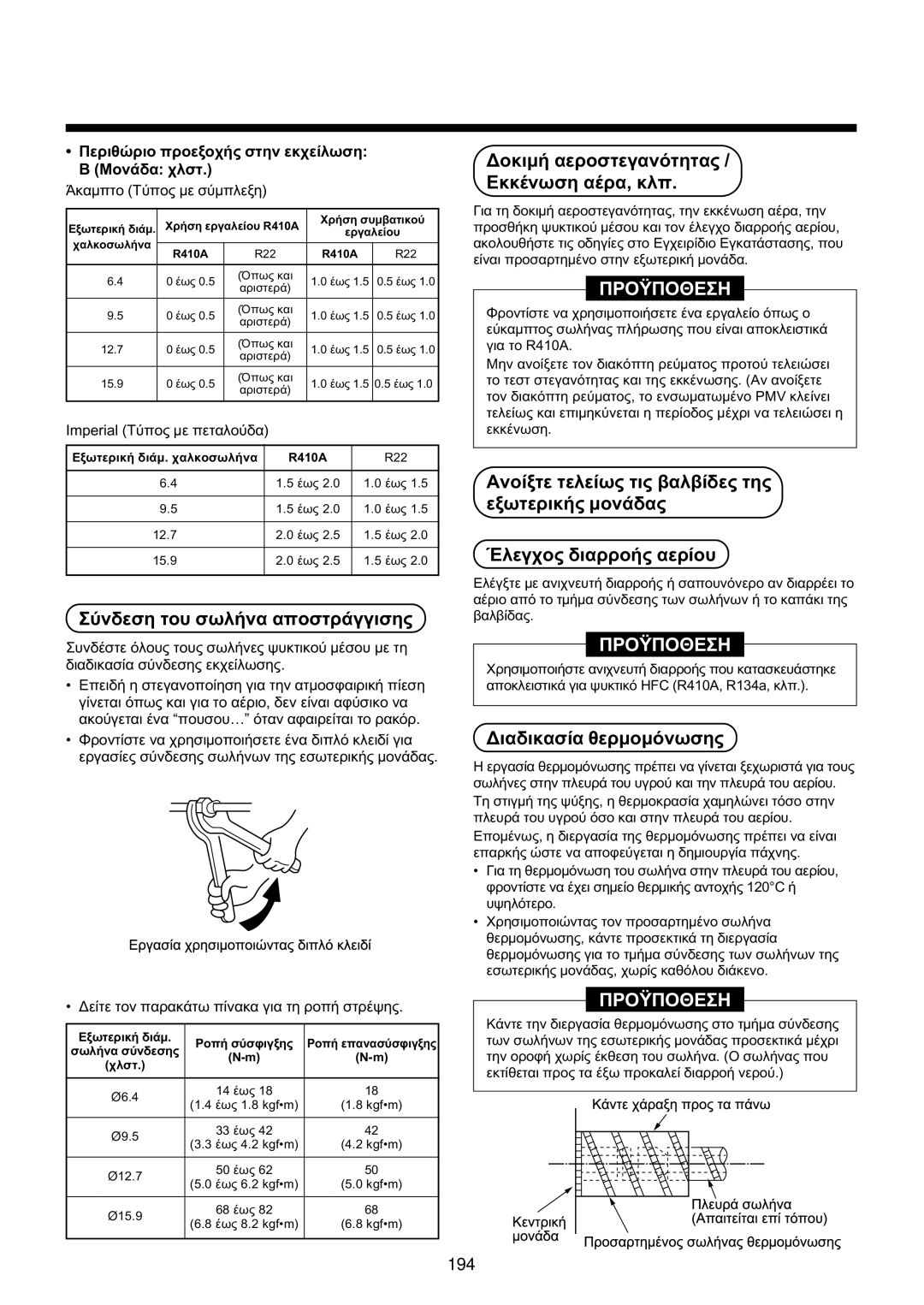
Èåñìïìüíùóç ôïõ ôìÞìáôïò óýíäåóçò ôïõ óùëÞíá
Ìïñöïðïßçóç óùëÞíùí / ÈÝóç Üêñùí
Åðéôñåðüìåíï ìÞêïò óùëÞíá êáé åðéôñåðüìåíç äéáöïñÜ ýøïõò
Õëéêü êáé äéáóôÜóåéò óùëÞíùóçò
Äéáäéêáóßá èåñìïìüíùóçò
Óýíäåóç ôïõ óùëÞíá áðïóôñÜããéóçò
ÄïêéìÞ áåñïóôåãáíüôçôáò / ÅêêÝíùóç áÝñá, êëð
$ Çëåêôñéêç Åñãáóéá
Ðáñï÷Þ ñåýìáôïò ôçò åóùôåñéêÞò ìïíÜäáò
ÐñïäéáãñáöÝò ðáñï÷Þò ñåýìáôïò
×åéñéóìüò ôçò èýñáò ôçò êáëùäßùóçò óýíäåóçò
Óýíäåóç êáëùäßùí
Ðþò íá áöáéñÝóôå ôï êÜëõììá ôïõ çëåêôñéêïý êïõôéïý
Êáëùäßùóç ìåôáîý åóùôåñéêÞò êáé åîùôåñéêÞò ìïíÜäáò
Êáëùäßùóç ôçëå÷åéñéóôçñßïõ
Ñýèìéóç ôçò äéåýèõíóçò
Êáëùäßùóç óôï öÜôíùìá ôçò ïñïöÞò
ÁëëáãÞ ñõèìßóåùí åöáñìüóéìùí åíôïëþí
Åöáñìïóéìïé ÅËÅÃ×ÏÉ
Ïìáäéêüò Ýëåã÷ïò
ÁëëáãÞ ôïõ ÷ñüíïõ áíÜììáôïò ôïõ óÞìáôïò ôïõ ößëôñïõ
Ãéá íá åîáóöáëßóåôå êáëýôåñá áðïôåëÝóìáôá óôç èÝñìáíóç
Ðþò íá êÜíåôå ôç äïêéìÞ ëåéôïõñãßáò
Ðñéí ôç äéáäéêáóßá äïêéìÞò
202
ÌÝèïäïò åëÝã÷ïõ
Åðéâåâáßùóç êáé Ýëåã÷ïò
Åðéâåâáßùóç éóôïñéêïý óöáëìÜôùí
Ïñïëïãßá
Ëßóôá êùäéêþí åëÝã÷ïõ
Áíôéìåôùðéóç Ðñïâëçìáôùí
206
Ïèüíç óå åíóýñìáôï ôçëå÷åéñéóôÞñéï
ÍÝïò êùäéêüò åëÝã÷ïõ
Ôýðïò êáóÝôáò êüìðáêô åêñïÞò áÝñá ìßáò êáôåýèõíóçò
ÊáèçìåñéíÞ óõíôÞñçóç
Check of Concentration Limit
EH99832901
Confirmation of Indoor Unit Setup
Indoor unit setup check sheet