Release Date 12/14/00
REV C Sheet
ALL Revisions REV Description
Honeywell MK Xxii Egpws Installation Manual
Table of Contents
Honeywell MK VI MK Viii Egpws Installation Design Guide
Honeywell MK VI MK Viii Egpws Installation Design Guide
104
Section V Certification
149
143
158
160
Aircraft Application Data
Section General Information
Honeywell MK Xxii Egpws Installation Manual
Section I General Information
License Requirements
Applicability
How To Use This Docu ment
Introduction
Reference Documents
Description of Equipm ent
MK Xxii Egpws Conf iguration Module
MK Xxii Egpws Comp uter
GPS Antenna
OAT Sensor
Smart Cable Pcmcia Interface
Technical Characteris tics
MK Xxii Egpws Smart Cable
MK Xxii Egpws
Configuration Module
Units Supplied
Honeywell MK Xxii Egpws Installation Manual
New Egpws installation with Internal GPS
Installation and Acces sories Kits
2 RS-232 Cable
Smart Cable
Flight History Card
Terrain Database Card s
Annunciators & Switc h/Annunciators
GPS Antenna & cable
Circuit Breaker
Cockpit Speaker Opti onal
Contact Positioner P 1, P2, P3
Tools Required Crimping Tool P1, P 2, P3
Insertion/Removal Too l P1, P2, P3
Spare Contacts P1, P 2, P3
Honeywell MK Xxii Egpws Installation Manual
Section Installation
Honeywell MK Xxii Egpws Installation Manual
Section II Installation
Unpacking and Inspec ting the Equipment
Equipment Installation 2.3.1 General
MK Xxii Computer Ins tallation
MK Xxii Computer Loc ation
Configuration Module Installation
Configuration Module Location
Required
Configuration Module Assembly
1 MK Xxii Egpws Configuration Module
Installation Assembly Sequence
2 MK Xxii Egpws Configuration Module
3 MK Xxii Egpws Configuration Module
4 MK Xxii Egpws Configuration Module
5 MK Xxii Egpws Configuration Module
6 MK Xxii Egpws Configuration Module
7 MK Xxii Egpws Configuration Module
OAT Sensor Installatio n
GPS Antenna Installat ion
Cockpit Annunciators / Switches
GPS Antenna location
Egpws cautionGPWS G/S Cancld
Description
Gpws warning red & Gpws alert amber
Location
8 MK Xxii Egpws Annunciators/Switches Location
Low Altitude Mode
Inhibit Switch Functio ns and Selection
Terrain Inhibit
Audio Inhibit Timed
MK Xxii Egpws Outline
Honeywell P/N 405-0383-001
MK Xxii Egpws Mounting Tray
Honeywell MK Xxii Egpws Installation Manual
Section System Planning
Honeywell MK Xxii Egpws Installation Manual
Section III System Planning
Category 8 Radio Altitude Input Select
Category 14 Audio Output Level
Chassis Ground
System Wiring/ Electr ical Interfaces
Primary Power Input
Serial Outputs
Analog and Digital Inp uts
Discrete Inputs
Discrete Outputs
Audio Output
Category 1 Aircraft / Mode Type Select
Configurable Interface s
Aircraft / Mode Type
Instructions
Category 2 Air Data Input Select
Egpws MK
Examples Analog altitude and 500 ohm OAT
Digital Arinc 429 Cat ID 5, 1
Arinc
Digital -ARINC 575 Cat ID
Shadin 2000 Cat ID
Digital Arinc 429 Dual IOC Buses Cat . ID
Arinc 743 Format
Category 3 Position Input Select
3.2 RS-232 Transmit-Receive, 9600 baud Cat ID
Examples Arinc 429 BUS Cat ID 0,1,4,5
Dual Arinc 429 BUS Cat ID
Category 4 Altitude Callouts
Category 5 Audio Menu Select
TAD Selection
Category 6 Terrain Display Select
Type of sweep used for terrain data fan, standard, etc
Terrain Display Configuration Group
6-1 Single Tube Wx/Terrain Display
Example
Display Input Control Group
Output 429 Bus Group
TRA-45A
Egpws
J101
Egpws Avidyne FSD
Honeywell WRX R/T
Honeywell Radar Indicator
Arinc 429 Range #1 Arinc 429 Range #2 Kcpb Video #1 Out
Avtech DSU
7.3 TA&D Alternate Pop-up
Category 7 Options Select Group #1
Steep Approach Not Available in the Mk
Bank Angle Callout Enabling
Peaks Mode
Obstacle Awareness
GPS Altitude Reference
WOW Reversal
Example Digital Radio Altitude Interface
Category 8 Radio Altitude Input Select
Analog Radio Altitude Interface
DH Discrete Gnd Valid Radio Altimeter Indicator
Category 9 Navigation Inputs Select
RNA-34A
Example Analog Glideslope Interface cat ID 0,1,5
Dual Glideslope Receiver
Digital Glideslope/Localizer Interface
Category 10 Attitude Input Select
Attitude Signals
Vertical Gyro
Example Analog Roll Angle Synchro
Ahrs
Digital Arinc 429 High Speed
Magnetic Heading
Category 11 Heading Input Select
Directional Gyro
Example Analog Heading Synchro CAT ID
Heading High Speed
Instruction
Category 12 Windshear Input Select
Input/Output Discretes
Category 13 Input / Output Discrete Type Select
Landing Gear Discrete
Weight on Wheels WOW Discrete
Audio Inhibit Discrete
Autopilot Engaged Discrete
Glideslope Cancel Discrete
Mode 6 Low Volume Discrete
Glideslope Inhibit Discrete
Terrain Awareness Inhibit
Self Test Discrete
Timed Audio Inhibit Discrete
Low Altitude Mode Select Discrete
Output Discretes
Lamp Format
TAD Inop Discrete
Gpws Inop Discrete
Gpws Warning Discrete
Gpws Alert Discrete
Terrain Display Select #1 & #2 Discrete
Low Altitude Mode Discrete
REV C Sheet
Ohm
Category 14 Audio Output Level
Category 15, Autorotation Threshold
Autorotation Threshold
107
108
Unit Installation
Harness Checkout and Power Check
Egpwc Initialization a nd Configuration
1 RS-232 Communicatio n with the MK Xxii Egpws
WinVIEWS
Egpwc Front Panel T est Connector
WinVIEWS Operation
Configuration Module Programming
112
CFG CUW 0/15 128 3 2 134 128 3 29 1 0 2 0 0 129 0
CUW and CMR Comm ands
CATspacecategory #spaceID#spaceT or FEnter
Configuration Module Reprogramming
Approval
Regional Terrain Data base Loading 4.6.1 Effectivity
Material Cost and Av ailability
Accomplishment Instr uctions
Verification of the Ter rain Database Version
END of Test
120
Section Certification
Honeywell MK Xxii Egpws Installation Manual
Section V Certification
Equipment Location
Certification Procedur e Equipment Compatibi lity
FAA Requirements
Ground Test
Flight Test
Failure Modes, Effects , and Safety Analysis
Pilots Guide
Existing STC’s
Honeywell MK Xxii Egpws Installation Manual
Appendix a Customer Worksheet
Honeywell MK Xxii Egpws Installation Manual
Cockpit Displays
MK Xxii Egpws
GPS
Parameter
Discrete Inputs
Generic Model Information
System
REV C Sheet
REV C Sheet
REV C Sheet
REV C Sheet
REV C Sheet
Appendix B Sample Wiring Diagrams
DWG no 060-4314-225 Revc Sheet
Honeywell MK Xxii Egpws Installation Manual
Honeywell MK Xxii Egpws Installation Manual
Appendix C
Honeywell MK Xxii Egpws Installation Manual
Baud, No Parity, 8 bits, and 1 stop bit
RS-232 Communication with the Egpws
REV C Sheet
REV C Sheet
Honeywell MK Xxii Installation Manual
Appendix D Vendor Drawings
Honeywell MK Xxii Egpws Installation Manual
AMP
Vendor Contact Information
For orders and AOG requirements, contact
D1-1 Edmo
D1-2 Emteq
GPS RF Cable Sets
Inches Bend Radius Minimum
Per 100 ft
1 Connectors for Tflx cable series GPS
1 Connectors for Pflx cable series GPS
Tool Frame and Die Part Numbers
Installation Considerations
D1-3 Aerospace Optics
Aerospace Optics Inc
Mail switches@vivisun.com
StacoSwitch
Appendix E Interface Description Document
Honeywell MK Xxii Egpws Installation Manual
Honeywell MK Xxii Egpws Installation Manual
Connector Interface
System Overview
Introduction Part Number
Purpose
Primary Power Input
Signal Interfaces
Electrical Interface Introduction
Chassis Ground
Radio Altitude
DC Analog Inputs
LOW Level Glideslope
Localizer Deviation or LOW Level Glideslope Validity
Configuration Defined DC Inputs
Outside AIR Temperature
2.4
Barometric Altitude
2.7.1
AC Analog Inputs
Synchro Roll Attitude
2.7.2
Signal Timing Reference Inputs
Configuration Defined Synchro Inputs
Arinc 429/575 Digital Serial BUS Inputs
2.9
GPS RS-422 Digital Serial BUS Serial Port
2.9.1 RS-232 / RS-422 Digital Serial BUS Inputs
GPS RS-232 Digital Serial BUS Serial Port
AIR Data RS-232 Digital Serial BUS Serial Port
+28 VDC Discrete Characteristics
AIR Data RS-422 Digital Serial BUS Serial Port
SCI Range RS-422 Digital Serial BUS Serial Port
GPS Antenna Input
Configuration Module Interface
Ground Discrete Characteristics
Discrete Output Characteristics
Monitor Output Characteristics
OAT Voltage Reference Output
Lamp Driver Outputs
LOW Level Interphone Audio Output
High Level Speaker Audio Output
Arinc Digital Serial Output Busses
Arinc 429 Output BUS
Front Panel Test Interface
2.18.1 RS-232 Maintenance Port Serial Port
Arinc 453 Output BUS
GSE Present Discrete Input
Front Panel Status Indicators
Pcmcia / Smartcable Port
Aircraft Application Data
Configuration Types
Configuration Selection
Instruction
Signal Selection
Table E 3 Category ID Selection Procedure
Configuration Selection Tables
Category 1, Aircraft / Mode Type Select
Effectivity App Cfg
Torque Type Table E
Engine Torque Data Selection
Fault Designation Engine 1 BUS Bus Type Basic
Fault Designation Engine 2 BUS Bus Type Basic
Fault Designation Engine 2 BUS Bus Type RS-422 9600 baud
Fault Designation Engine 1 BUS Bus Type RS-422 9600 baud
Torque Data Select 9 Bell
Torque Data Select 8 AS365 Dauphin N3
Torque Data Select 10 Bell Summary Data
Torque Data Select 11 Bell 212/412 Summary Data
Torque Data Select 14 Coast Guard HH-65 Summary Data
Fault Designation Engine 1 BUS
Torque Data Select 16 Common DC Torque
Connection Summary Data
Table E 3.1.2 AIR Data Input Select for Egpws Mkxxii
Category 2, AIR Data Input Select
Table E Description
Type Summary Data
Configuration Data
Fault Designation AIR Data BUS Bus Type Basic
Table E 3.1.2-3 AIR Data Input Select #3 Summary Data
Connect to Channel
Table E 3.1.2-4 AIR Data Input Select #4 Summary Data
Table E 3.1.2-5 AIR Data Input Select #5
Table E 3.1.2-6 AIR Data Input Select #6
Channel 429RX2
Channel Connect to
Table E 3.1.2-10 AIR Data Input Select #10
Table E 3.1.2-11 AIR Data Input Select #11 Summary Data
Position Input Type TableE Description
3.3
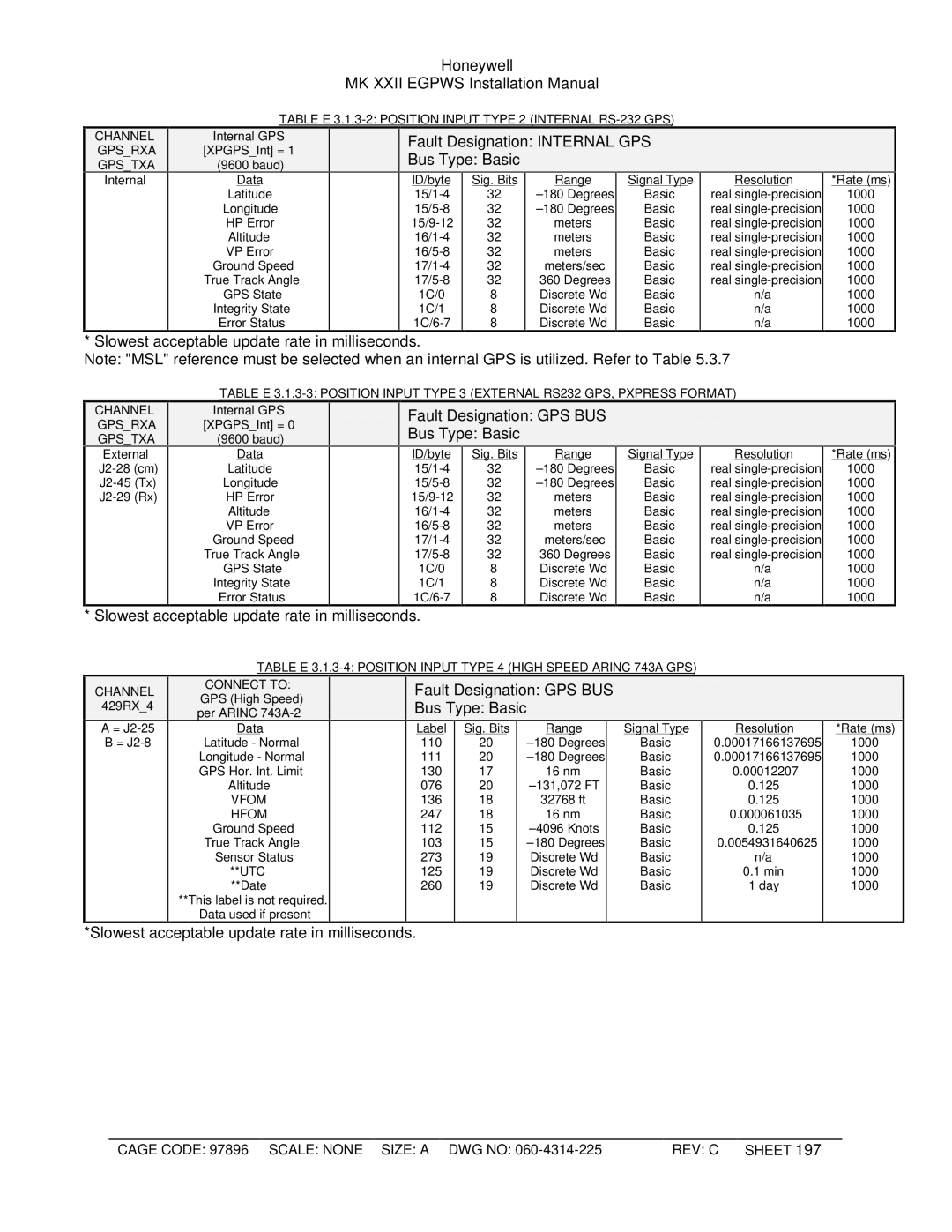
Category 3, Position Input Select
UTC
Fault Designation GPS BUS Bus Type Basic
Internal
Fault Designation Internal GPS Bus Type Basic
Bus Type Basic
Fault Designation GPS BUS
Table E 3.1.4 Altitude Callouts for Egpws Mkxxii
Category 4, Altitude Callouts
App Cfg
Honeywell MK Xxii Egpws Installation Manual
Effectivity App Cfg 006
Category 5, Audio Menu Select
Table E 3.1.5 Audio Menu Type
Table E 3.1.5-128 Audio Menu Type 128 Basic Helicopter
Category 6, Terrain Display Select
IDand TCF Disable Application Notes
Section Overview
Defined By
Honeywell MK Xxii Egpws Installation Manual
Table E KC Picture Bus
Channel
Table Table E 3.1.6-1 No Display TAD and TCF Enabled
Table Table E 3.1.6-2 TA&D / TCF Disabled
Display Configuration Group 6 Collins PRO-LINE II
Fault Designation Display BUS Bus Type Basic
Table Table E 3.1.6-3 Collins ProLine II
Integration note
Table Table E 3.1.6-4 Bendix PPI-4A/4B
Display Configuration Group 1 Bendix RDR 4A/B PPI with MOD
Table E Collins ProLine II
Display Configuration Group 2 Collins Proline II
Table E Collins ProLine II 5x4,5x5
Display Configuration Group 3 Collins Proline II, 5X4
Table E Non-Integrated Efis 40/50 Honeywell/Bendix
Display Configuration Group 7 NON-INTEGRATED Efis 40/50
Table E 3.1.6-10 Integrated Efis 40/50 Honeywell/Bendix
Peaks Always Enabled
Display Configuration Group 8 Integrated Efis 40/50
Honeywell MK Xxii Egpws Installation Manual
Table E 3.1.6-12 Collins WXI-701/711, without Auto Range
Terrain Display BUS #1 453TX1
Integration note Pins
Terrain Display BUS #2
Reference Name
Terrain Display BUS #2 453TX2
Table E 3.1.6-14 Bendix PPI-4A/4B without Auto Range
6.3-0OUTPUT 429 BUS Group Traceability
6.2-3 Display Input Control Group
Reference Name PIN Function
Reference section
Table E 3.1.6-16 Bendix IN182A/IN812A Radar display RDR
Output 429 Bus Group
Pins Comments
Function Value
Table E Bendix IN842A/IN862A Radar display RDR
Category 7, Options Select Group #1
TA&D Alternate Pop Up False TA&D Alternate Pop Up True
Display Input Control Group
Display Input Control Group
Honeywell
Fault Designation IOC BUS
Table E3.1.6-236 Display Configuration Collins ProLine IV
Honeywell
Channel 429RX8
Table E 3.1.6-246 Non-Integrated Efis 10 Bendix/Honeywell
Connect to DC811 #2
Connect to DC811 #1 Display Input Control Group
Channel 422RX2
Honeywell MK Xxii Egpws Installation Manual
SCI Bus RS-422 12K baud
Table E 317 Options Select Group #1
Category 7, Options 1 Select
Altitude Reference6 Effectivity App Cfg
True False WGS-84
Description Value
Category 8, Radio Altitude Input Select
Radio Altitude Type Table E Description
PIN Type Channel Designation Reference
PIN Function Connection
Reference Summary Data
Table E 3.1.8-5 Radio Altitude Input Select Type 5 ALT
Table E 3.1.9 Navigation Input Select for Egpws Mkxxii
Category 9, Navigation Input Select
Table E 3.1.9-0 Navigation Inputs Select Summary Data
Connection PIN Type
Fault Designation ILS BUS
Fault Designation ILS BUS Bus T ype Basic
Attitude Input Select
Category 10, Attitude Input Select
Table E 3.1.10 Attitude Input Select for Egpws MK
Table E 3.1.10-0 Attitude Input Select Type
Table E 3.1.10-128 Attitude Input Select Type Connect to
Fault Designation Ahrs BUS
Table E 3.1.10-4 Attitude Input Select Type
Category 11, Heading Input Select
Fault Designation Ahrs BUS Bus Type Basic
Heading Input Select Table E Description
Table E 3.1.11 Heading Input Select for Egpws MK
No Windshear
Category 12, Windshear Input Select
Effectivity App Cfg 003
Table E 3.1.12 Windshear Input Select
Input/Output Discrete Type Table E
Category 13, Input / Output Discrete Type Select
Table E 3.1.13-128 INPUT/OUTPUT Discrete Type
Configuration Data Possible States
State
Table E 3.1.13-129 INPUT/OUTPUT Discrete Type
Table E 3.1.14 Audio Output Level
Volume Select
Category 14, Audio Output Level
Table E 3.1.15 Autorotation Threshold for Egpws MK
Category 15, Autorotation Threshold
Autorotation Threshold Torque
SYN1X SYN1Z SYN2Z
Connector Pin
Refer to Category 13 where multiple uses are possible
Honeywell MK Xxii Egpws Installation Manual
Figure E 4.1, Connector Pin References J1, J2, J3
Definitions
AcronymInterpretation
Acronym Interpretation
Pcmcia