ActivMedia Robotics
User Control Panel
The User Control Panel is where you have access to the
The red PWR LED is lit whenever main power is applied to the robot. The green STAT LED state depends on the operating mode and other conditions. It flashes slowly when the controller is awaiting a connection with a client and flashes quickly when in joydrive mode or when connected with a client and the motors are engaged. It also flashes moderately fast when the controller is in maintenance mode.
The BATTERY LED’s apparent color depends on your robot’s battery voltage: green when fully charged (>12.5 volts) through orange, and finally red when the voltage is below
11.5.When in maintenance mode, however, the BATTERY LED glows bright red only, regardless of battery charge.
A
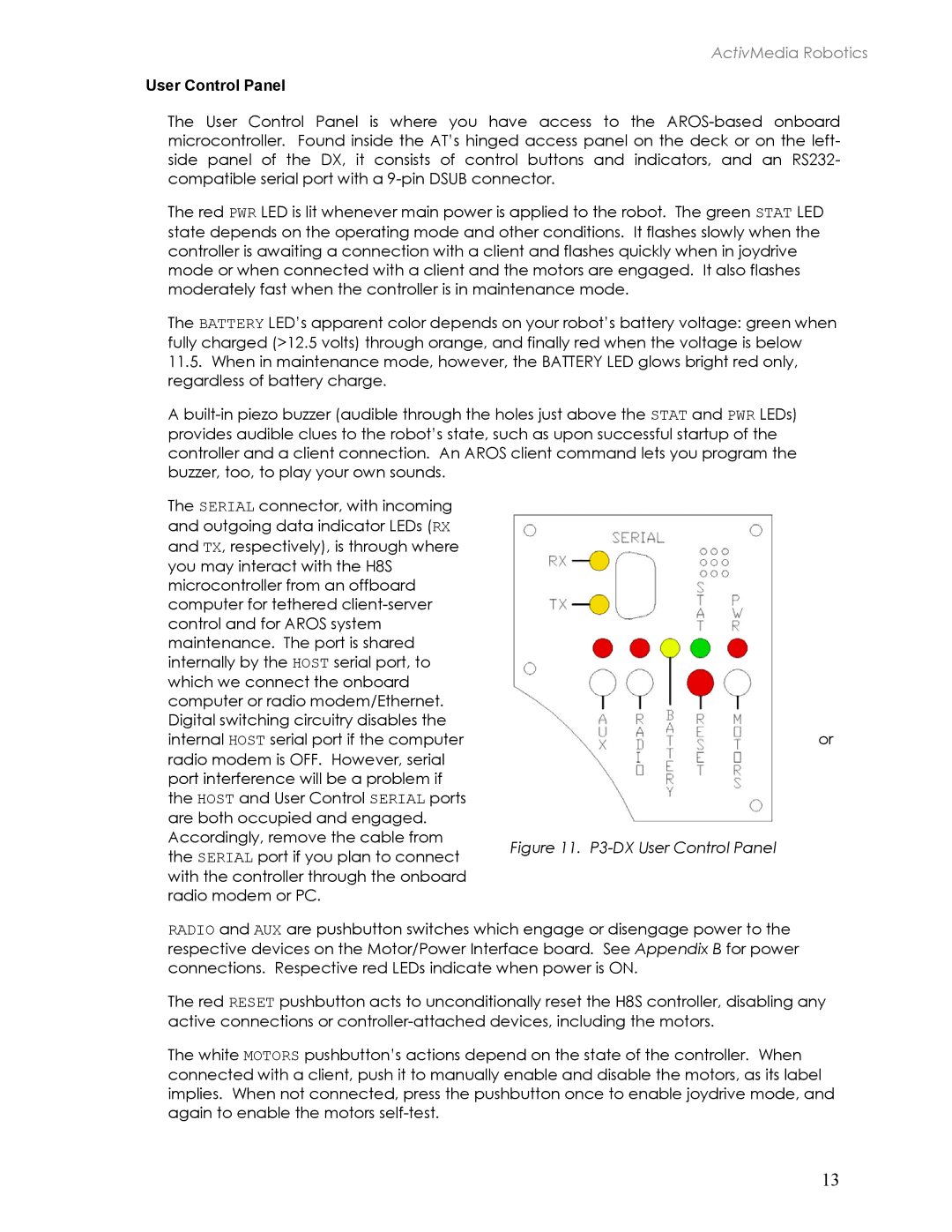
The SERIAL connector, with incoming |
| |
and outgoing data indicator LEDs (RX |
| |
and TX, respectively), is through where |
| |
you may interact with the H8S |
| |
microcontroller from an offboard |
| |
computer for tethered |
| |
control and for AROS system |
| |
maintenance. The port is shared |
| |
internally by the HOST serial port, to |
| |
which we connect the onboard |
| |
computer or radio modem/Ethernet. |
| |
Digital switching circuitry disables the | or | |
internal HOST serial port if the computer | ||
radio modem is OFF. However, serial |
| |
port interference will be a problem if |
| |
the HOST and User Control SERIAL ports |
| |
are both occupied and engaged. |
| |
Accordingly, remove the cable from | Figure 11. | |
the SERIAL port if you plan to connect | ||
| ||
with the controller through the onboard |
| |
radio modem or PC. |
|
RADIO and AUX are pushbutton switches which engage or disengage power to the respective devices on the Motor/Power Interface board. See Appendix B for power connections. Respective red LEDs indicate when power is ON.
The red RESET pushbutton acts to unconditionally reset the H8S controller, disabling any active connections or
The white MOTORS pushbutton’s actions depend on the state of the controller. When connected with a client, push it to manually enable and disable the motors, as its label implies. When not connected, press the pushbutton once to enable joydrive mode, and again to enable the motors
13