Specifications and Controls
mechanism. And the charging mechanism will not activate until you disengage the motors, either manually or programmatically.
RADIO CONTROLS AND ACCESSORIES
All ActivMedia robots are servers in a
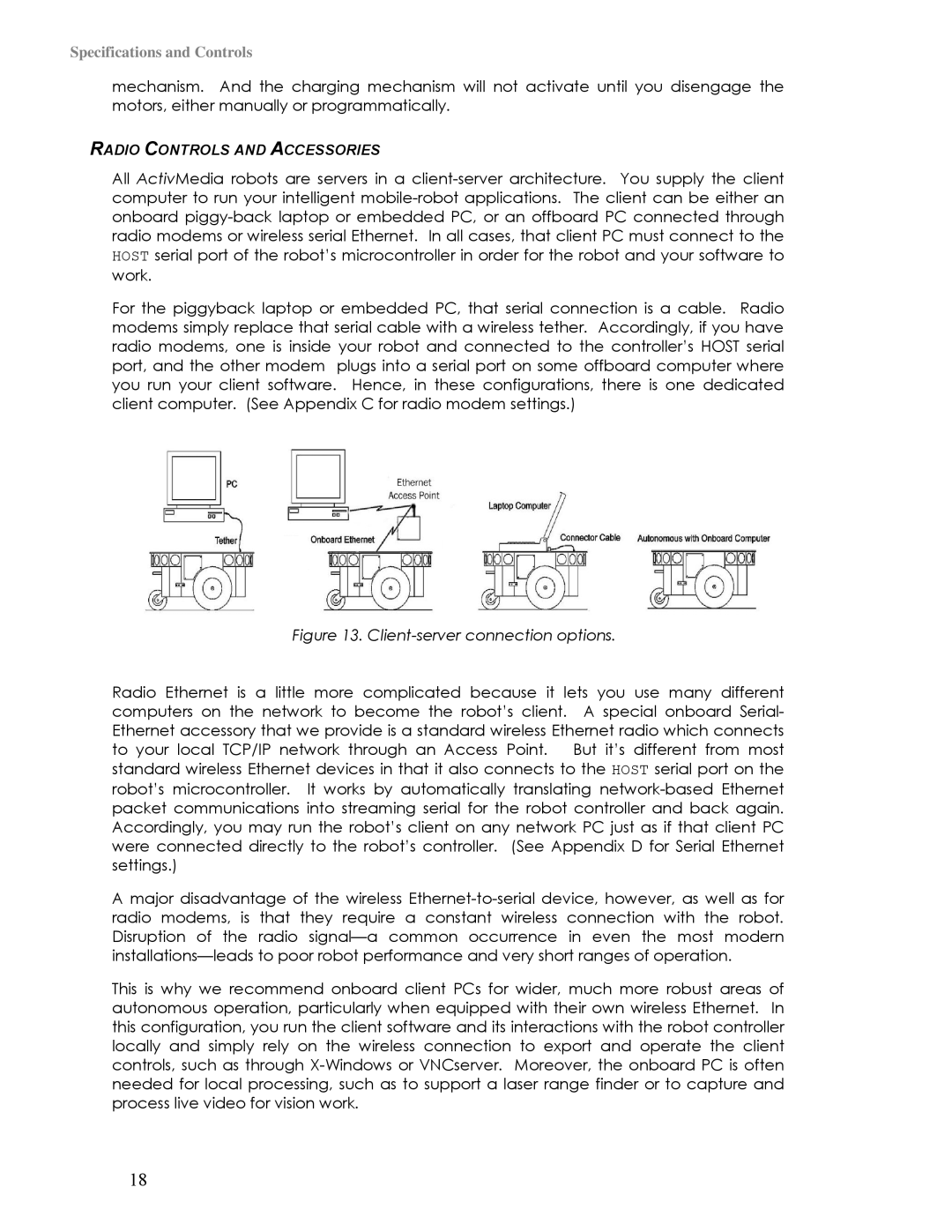
For the piggyback laptop or embedded PC, that serial connection is a cable. Radio modems simply replace that serial cable with a wireless tether. Accordingly, if you have radio modems, one is inside your robot and connected to the controller’s HOST serial port, and the other modem plugs into a serial port on some offboard computer where you run your client software. Hence, in these configurations, there is one dedicated client computer. (See Appendix C for radio modem settings.)
Figure 13. Client-server connection options.
Radio Ethernet is a little more complicated because it lets you use many different computers on the network to become the robot’s client. A special onboard Serial- Ethernet accessory that we provide is a standard wireless Ethernet radio which connects to your local TCP/IP network through an Access Point. But it’s different from most standard wireless Ethernet devices in that it also connects to the HOST serial port on the robot’s microcontroller. It works by automatically translating
A major disadvantage of the wireless
This is why we recommend onboard client PCs for wider, much more robust areas of autonomous operation, particularly when equipped with their own wireless Ethernet. In this configuration, you run the client software and its interactions with the robot controller locally and simply rely on the wireless connection to export and operate the client controls, such as through
18