ActivMedia Robotics Operating System
|
| received a command from a client. Restarts on restoration | ||
|
| of connection. | ||
P2MPACS | byte | 1 enables alternative SIP. | ||
STALLVAL | int | Maximum PWM before stall. If > PwmMax, never. | ||
STALLCOUNT | int | Ms time after a stall for recovery. Motors not engaged | ||
|
| during this time. | ||
JOYVEL | int | Joystick translation velocity setting, mm/sec | ||
JOYRVEL | int | Joystick rotation velocity setting in deg/sec | ||
ROTVELMAX | int | Current max rotational speed; deg/sec. | ||
TRANSVELMAX | int | Current max translational speed; mm/sec. | ||
ROTACC | int | Current rotational acceleration; deg/sec2 | ||
ROTDECEL | int | Current rotational deceleration; deg/sec2 | ||
ROTKP | int | Current Proportional PID for rotation | ||
ROTKV | int | Current Derivative PID for rotation | ||
ROTKI | int | Current Integral PID for rotation | ||
TRANSACC | int | Current translational acceleration; mm/sec2 | ||
TRANSDECEL | int | Current translational deceleration; mm/sec2 | ||
TRANSKP | int | Current Proportional PID for translation | ||
TRANSKV | int | Current Derivative PID for translation | ||
TRANSKI | int | Current Integral PID for translation | ||
ADDED IN AROS | 1.6 |
|
|
|
FRONTBUMPS | byte | Number of front bumper segments |
|
|
REARBUMPS | byte | Number of rear bumper segments | ||
ADDED IN AROS | 1.7 |
|
|
|
CHARGER
byte
1 if P3 or 2 if PowerBot automated charger mechanism and circuitry installed in robot; otherwise 0
ADDED IN AROS 1.8
SONARCYCLE | byte | Sonar duty cycle time in milliseconds | |||
AUTOBAUD | byte | 1 | if | can | change baud rates; 2 if |
HASGYRO | byte | 1 | if | has | the gyro device; otherwise 0 |
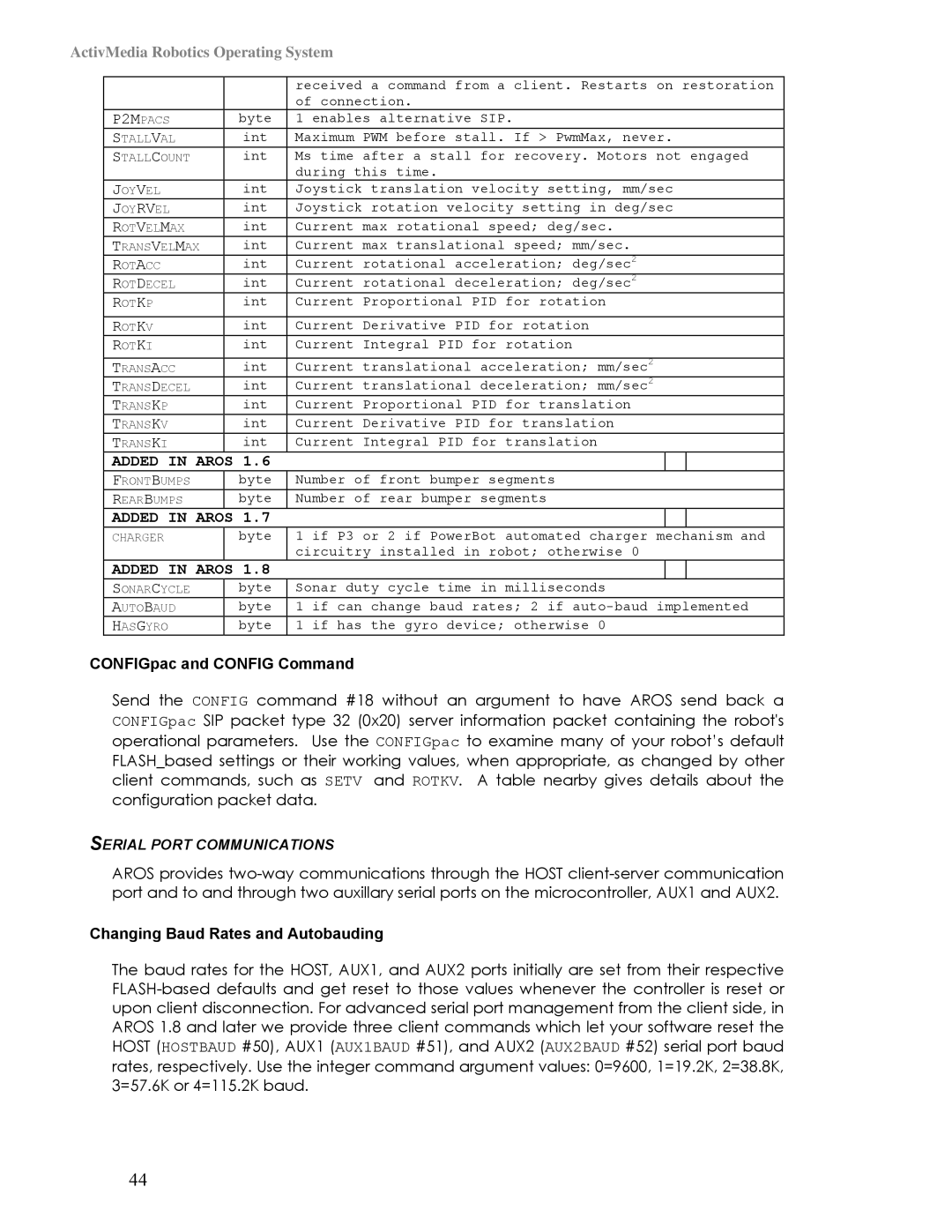
CONFIGpac and CONFIG Command
Send the CONFIG command #18 without an argument to have AROS send back a CONFIGpac SIP packet type 32 (0x20) server information packet containing the robot's operational parameters. Use the CONFIGpac to examine many of your robot’s default FLASH_based settings or their working values, when appropriate, as changed by other client commands, such as SETV and ROTKV. A table nearby gives details about the configuration packet data.
SERIAL PORT COMMUNICATIONS
AROS provides
Changing Baud Rates and Autobauding
The baud rates for the HOST, AUX1, and AUX2 ports initially are set from their respective
44