ActivMedia Robotics
ActivMedia Robots in Motion
ActivMedia robots use position, as opposed to velocity, motion controls to translate the platform a certain distance and turn it to a particular heading. To achieve constant translational (VEL), rotational (ROTATE), or
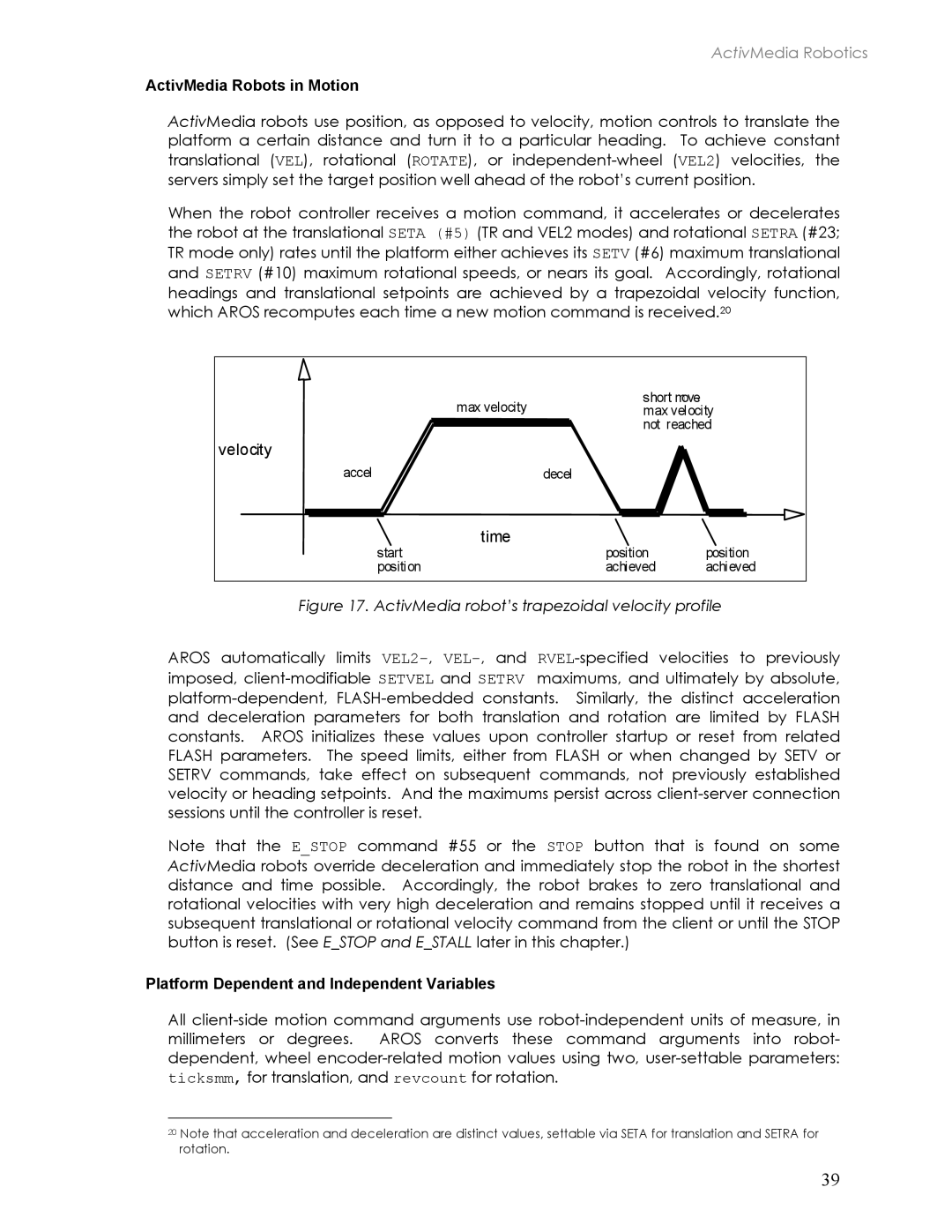
When the robot controller receives a motion command, it accelerates or decelerates the robot at the translational SETA (#5) (TR and VEL2 modes) and rotational SETRA (#23; TR mode only) rates until the platform either achieves its SETV (#6) maximum translational and SETRV (#10) maximum rotational speeds, or nears its goal. Accordingly, rotational headings and translational setpoints are achieved by a trapezoidal velocity function, which AROS recomputes each time a new motion command is received.20
| , |
|
max velocity | short move |
|
max velocity | ||
| not reached | |
velocity |
|
|
accel | decel |
|
time |
|
|
start | position | position |
position | achieved | achieved |
Figure 17. ActivMedia robot’s trapezoidal velocity profile
AROS automatically limits
Note that the E_STOP command #55 or the STOP button that is found on some ActivMedia robots override deceleration and immediately stop the robot in the shortest distance and time possible. Accordingly, the robot brakes to zero translational and rotational velocities with very high deceleration and remains stopped until it receives a subsequent translational or rotational velocity command from the client or until the STOP button is reset. (See E_STOP and E_STALL later in this chapter.)
Platform Dependent and Independent Variables
All
20Note that acceleration and deceleration are distinct values, settable via SETA for translation and SETRA for rotation.
39