ActivMedia Robotics
Chapter 6 ActivMedia Robotics Operating System
All ActivMedia robots use a
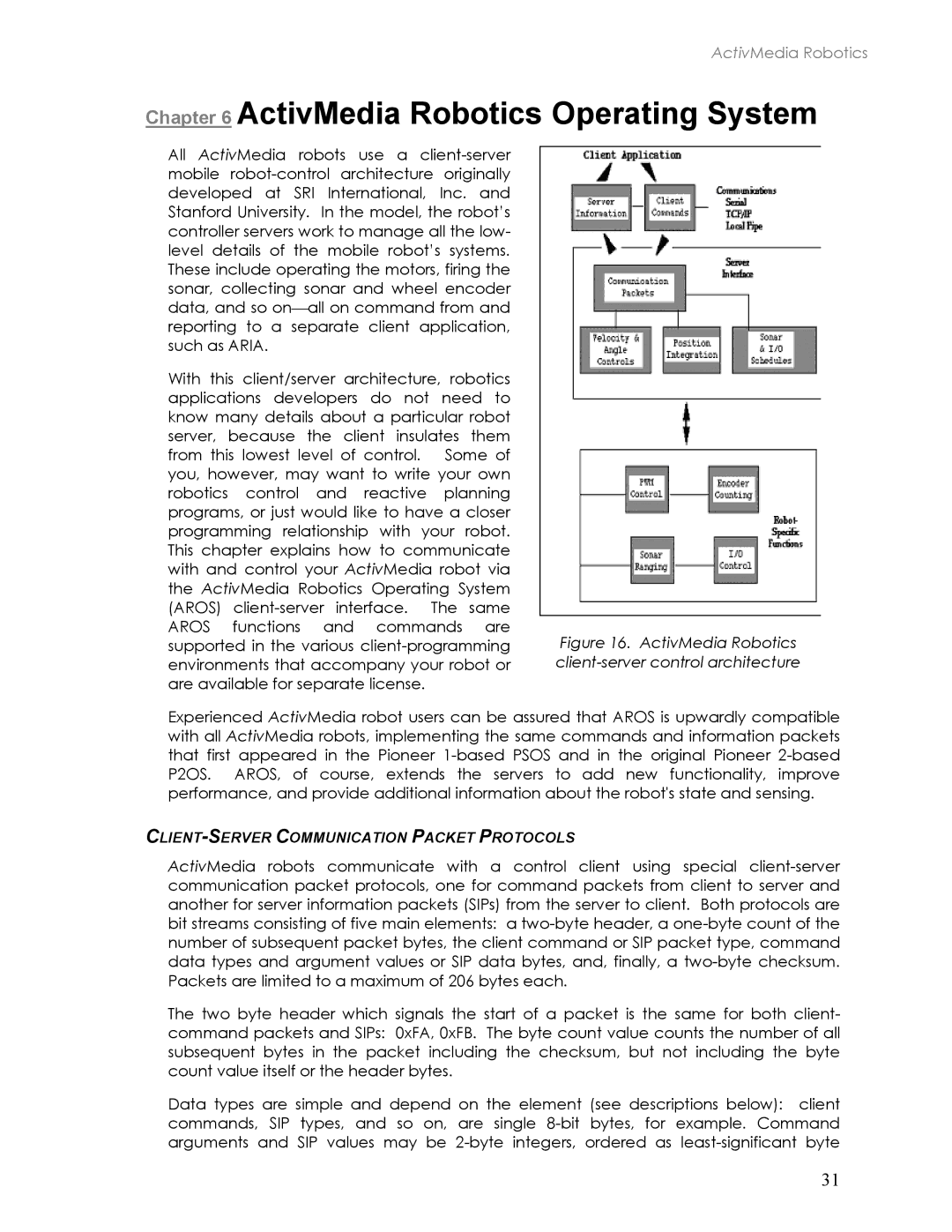
With this client/server architecture, robotics applications developers do not need to know many details about a particular robot server, because the client insulates them from this lowest level of control. Some of you, however, may want to write your own robotics control and reactive planning programs, or just would like to have a closer programming relationship with your robot. This chapter explains how to communicate with and control your ActivMedia robot via the ActivMedia Robotics Operating System (AROS)
Figure 16. ActivMedia Robotics client-server control architecture
Experienced ActivMedia robot users can be assured that AROS is upwardly compatible with all ActivMedia robots, implementing the same commands and information packets that first appeared in the Pioneer
CLIENT-SERVER COMMUNICATION PACKET PROTOCOLS
ActivMedia robots communicate with a control client using special
The two byte header which signals the start of a packet is the same for both client- command packets and SIPs: 0xFA, 0xFB. The byte count value counts the number of all subsequent bytes in the packet including the checksum, but not including the byte count value itself or the header bytes.
Data types are simple and depend on the element (see descriptions below): client commands, SIP types, and so on, are single
31