ActivMedia Robotics Operating System
With AROS versions 1.3 and later, many of the controller’s operating parameters return to their
MOTION COMMANDS
The AROS
Note that once connected, ActivMedia robots’ motors are disabled, regardless of their state when last connected. Accordingly, you must either enable the motors manually (white MOTORS button on the User Control Panel) or send the motors ENABLE client command #4 with the argument value of one.19 Monitor the status of the motors with bit 0 of the Flags integer in the standard SIP.
When in
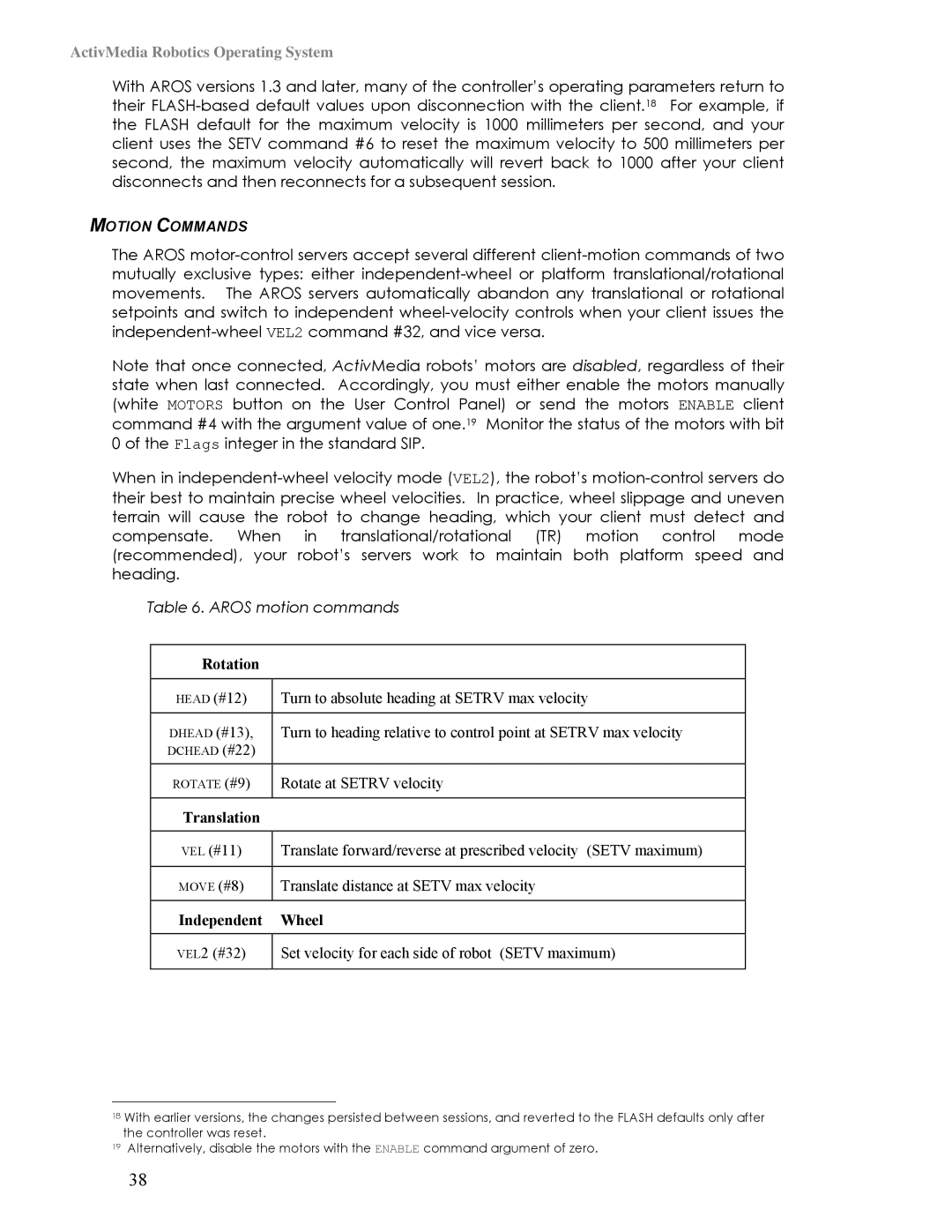
Table 6. AROS motion commands
Rotation
HEAD (#12) | Turn to absolute heading at SETRV max velocity |
|
|
DHEAD (#13), | Turn to heading relative to control point at SETRV max velocity |
DCHEAD (#22) |
|
|
|
ROTATE (#9) | Rotate at SETRV velocity |
|
|
Translation |
|
|
|
VEL (#11) | Translate forward/reverse at prescribed velocity (SETV maximum) |
|
|
MOVE (#8) | Translate distance at SETV max velocity |
|
|
Independent | Wheel |
VEL2 (#32)
Set velocity for each side of robot (SETV maximum)
18With earlier versions, the changes persisted between sessions, and reverted to the FLASH defaults only after the controller was reset.
19Alternatively, disable the motors with the ENABLE command argument of zero.
38