ActivMedia Robotics
For example, here’s the AROS client command to set digital output ports one and three (OD1 and OD3), reset port four (OD4), and leave all the rest alone (hexadecimal notation):
0xFA, 0xFB, 0x06, 0x1E, 0x1B, 0x19, 0x09, 0x37, 0x24
Bumper and IR I/O
Two
Similarly, the
Normally pulled high (digital 1), all the bumper and IR
IO packets
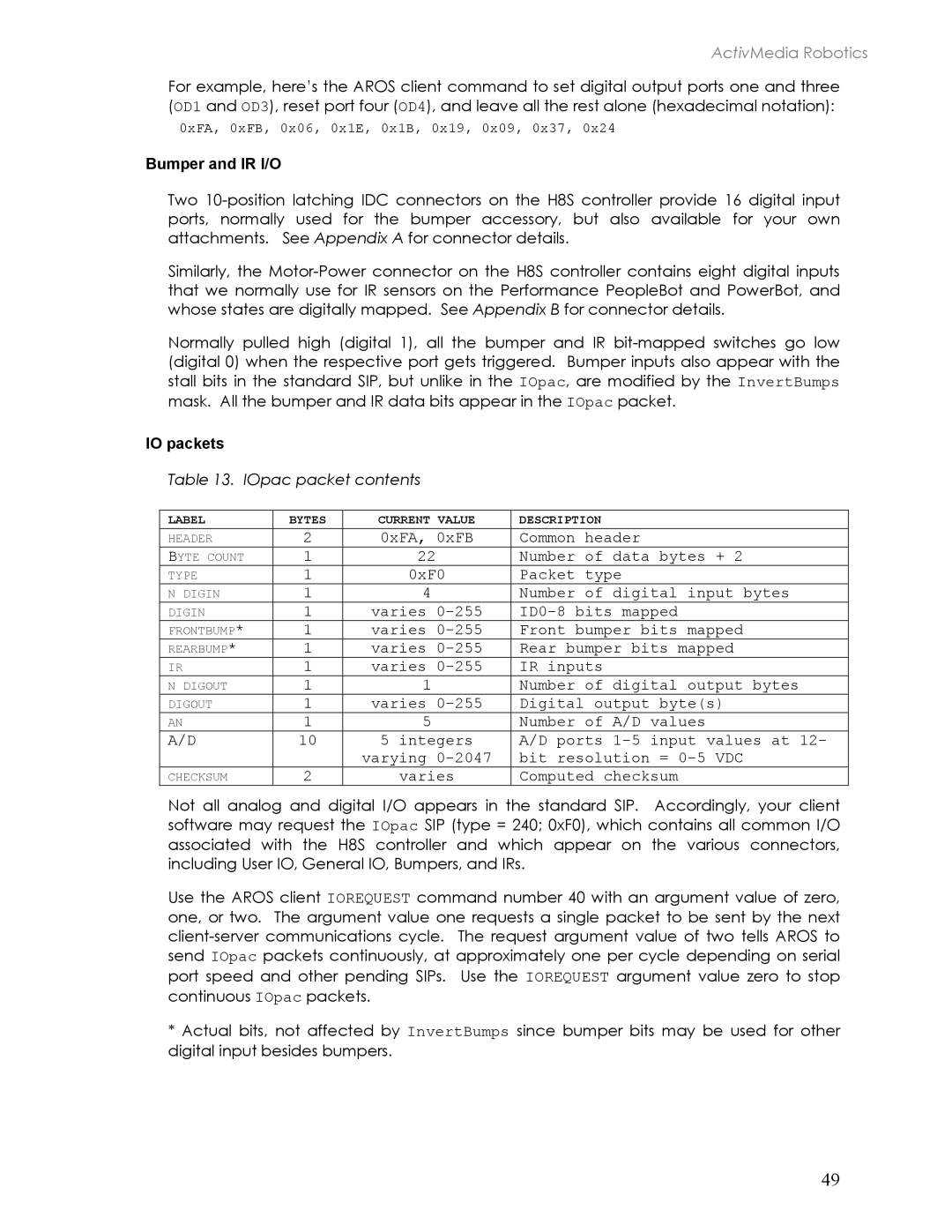
Table 13. IOpac packet contents
LABEL | BYTES | CURRENT VALUE | DESCRIPTION | |
HEADER | 2 | 0xFA, 0xFB | Common header | |
BYTE COUNT | 1 | 22 |
| Number of data bytes + 2 |
TYPE | 1 | 0xF0 | Packet type | |
N DIGIN | 1 | 4 |
| Number of digital input bytes |
DIGIN | 1 | varies | ||
FRONTBUMP* | 1 | varies | Front bumper bits mapped | |
REARBUMP* | 1 | varies | Rear bumper bits mapped | |
IR | 1 | varies | IR inputs | |
N DIGOUT | 1 | 1 |
| Number of digital output bytes |
DIGOUT | 1 | varies | Digital output byte(s) | |
AN | 1 | 5 |
| Number of A/D values |
A/D | 10 | 5 integers | A/D ports | |
|
| varying | bit resolution = | |
CHECKSUM | 2 | varies | Computed checksum | |
Not all analog and digital I/O appears in the standard SIP. Accordingly, your client software may request the IOpac SIP (type = 240; 0xF0), which contains all common I/O associated with the H8S controller and which appear on the various connectors, including User IO, General IO, Bumpers, and IRs.
Use the AROS client IOREQUEST command number 40 with an argument value of zero, one, or two. The argument value one requests a single packet to be sent by the next
*Actual bits, not affected by InvertBumps since bumper bits may be used for other digital input besides bumpers.
49