ActivMedia Robotics
disengage the motors while charging, such as by disconnecting, you will have to re- engage them from the client or by manually pressing the MOTORS button on the controller.
While the motors are engaged, the charging mechanism cannot be deployed, except by the CHARGE command. For best control and safety, consider also using the AROS CHARGE command number 68 with integer argument 0 to gracefully cancel charging, retract the charging mechanism, and restore motor state.
In addition to the
For example, the client may, upon untimely loss of recharging power resulting from someone pressing the Charge Deploy button, may
Your client software may disengage and
Monitoring the Recharge Cycle
Three digital signals indicate battery recharging states of the docking/recharging system. All appear in the standard SIP.
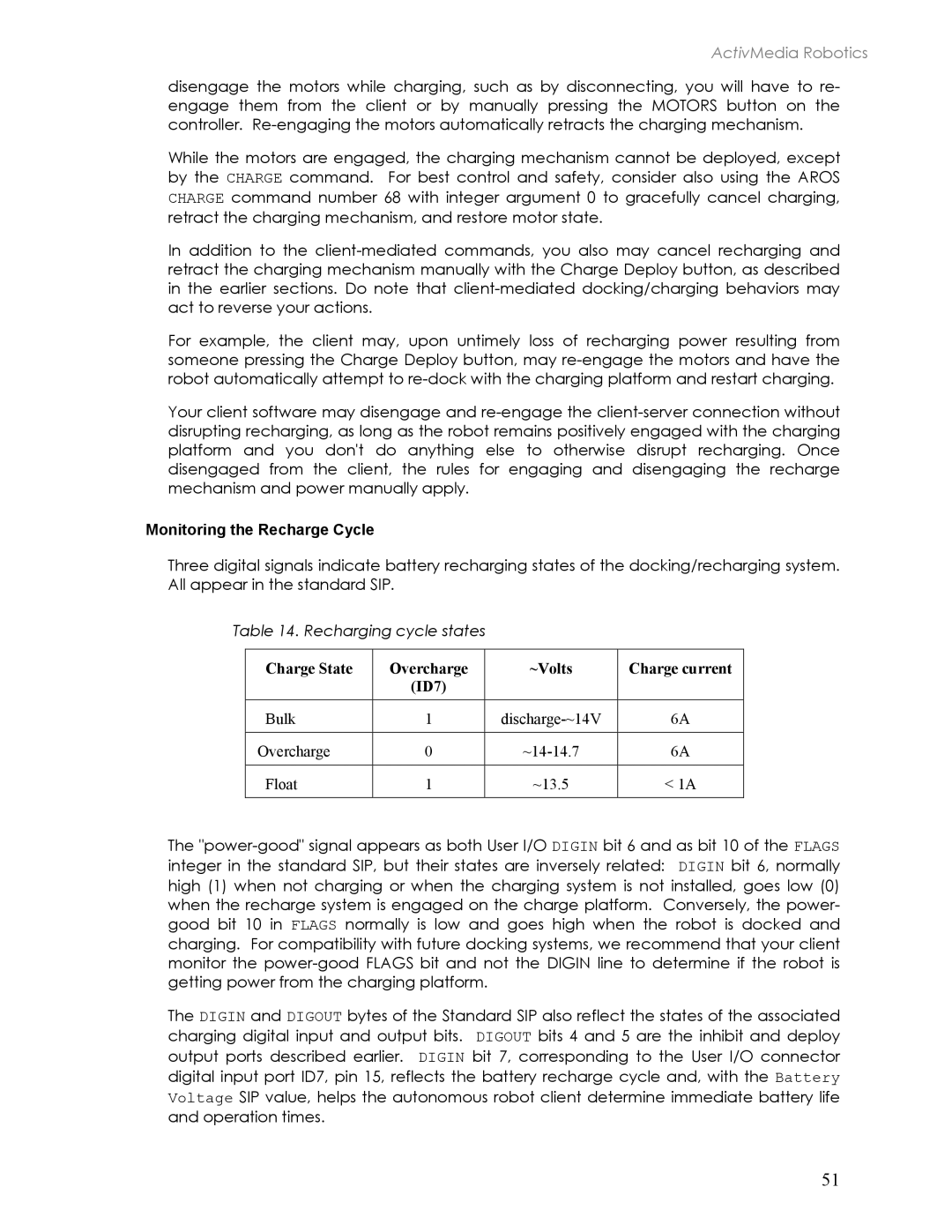
Table 14. Recharging cycle states
Charge State | Overcharge | ~Volts | Charge current |
| (ID7) |
|
|
|
|
|
|
Bulk | 1 |
| 6A |
|
|
|
|
Overcharge | 0 |
| 6A |
|
|
|
|
Float | 1 | ~13.5 | < 1A |
|
|
|
|
The
The DIGIN and DIGOUT bytes of the Standard SIP also reflect the states of the associated charging digital input and output bits. DIGOUT bits 4 and 5 are the inhibit and deploy output ports described earlier. DIGIN bit 7, corresponding to the User I/O connector digital input port ID7, pin 15, reflects the battery recharge cycle and, with the Battery Voltage SIP value, helps the autonomous robot client determine immediate battery life and operation times.
51