|
|
|
|
| ActivMedia Robotics | ||
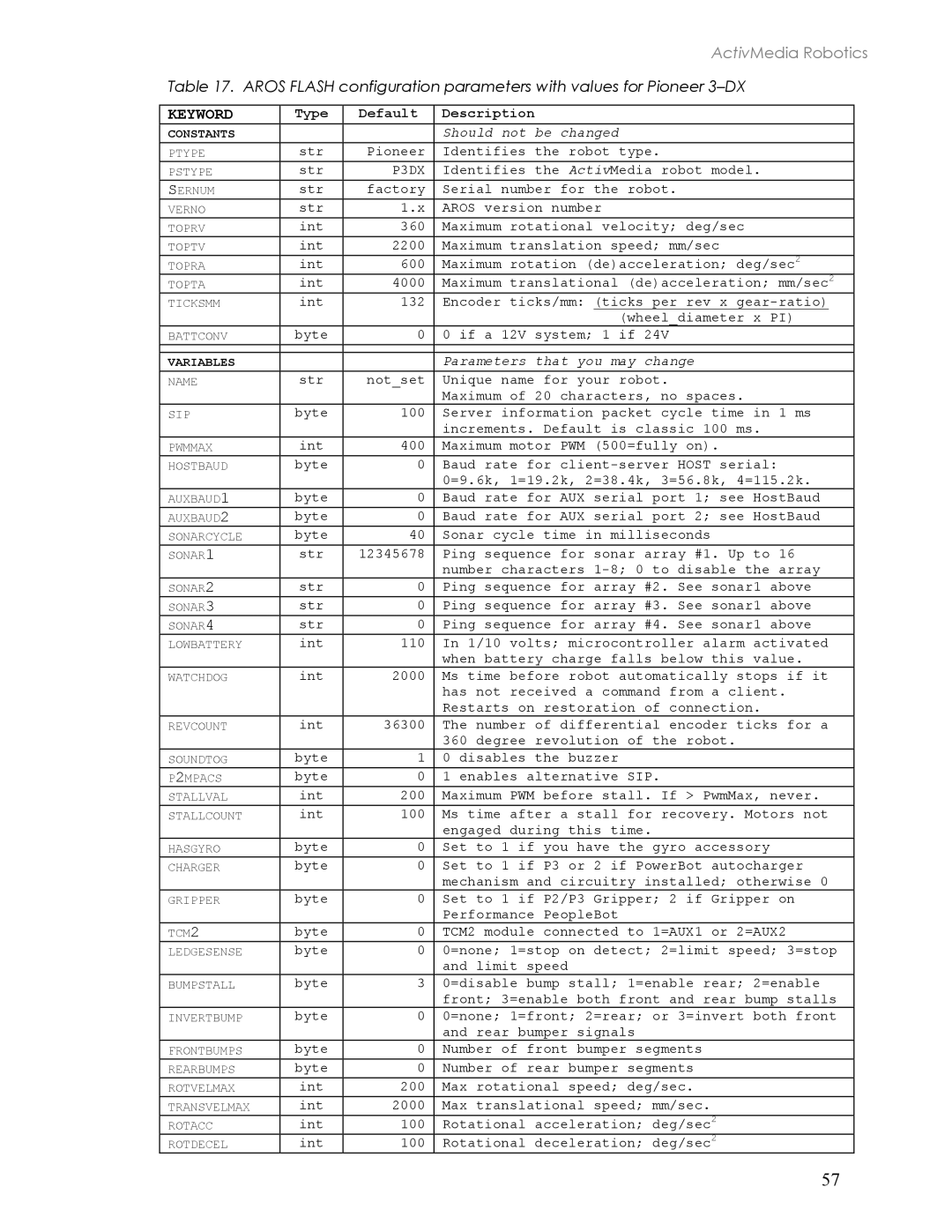
Table 17. AROS FLASH configuration parameters with values for Pioneer | |||||||
|
|
|
|
|
|
| |
KEYWORD | Type | Default | Description |
|
|
| |
CONSTANTS |
|
| Should not be changed |
|
|
| |
PTYPE | str | Pioneer | Identifies the robot type. |
|
|
| |
PSTYPE | str | P3DX | Identifies the ActivMedia robot model. |
| |||
SERNUM | str | factory | Serial number for the robot. |
|
| ||
VERNO | str | 1.x | AROS version number |
|
|
| |
TOPRV | int | 360 | Maximum rotational velocity; deg/sec |
| |||
TOPTV | int | 2200 | Maximum translation speed; mm/sec |
|
| ||
TOPRA | int | 600 | Maximum rotation (de)acceleration; deg/sec2 |
| |||
TOPTA | int | 4000 | Maximum translational (de)acceleration; mm/sec2 |
| |||
TICKSMM | int | 132 | Encoder ticks/mm: (ticks per rev x |
| |||
|
|
|
| (wheel_diameter x PI) |
| ||
BATTCONV | byte | 0 | 0 if a 12V system; 1 if 24V |
|
| ||
|
|
|
|
|
| ||
VARIABLES |
|
| Parameters that you may change |
|
| ||
NAME | str | not_set | Unique name for your robot. |
|
| ||
|
|
| Maximum of 20 characters, no spaces. |
| |||
SIP | byte | 100 | Server information packet cycle time in 1 ms |
| |||
|
|
| increments. Default is classic 100 ms. |
| |||
PWMMAX | int | 400 | Maximum motor PWM (500=fully on). |
|
| ||
HOSTBAUD | byte | 0 | Baud rate for |
| |||
|
|
| 0=9.6k, | 1=19.2k, 2=38.4k, | 3=56.8k, | 4=115.2k. |
|
AUXBAUD1 | byte | 0 | Baud rate for AUX serial port 1; see HostBaud |
| |||
AUXBAUD2 | byte | 0 | Baud rate for AUX serial port 2; see HostBaud |
| |||
SONARCYCLE | byte | 40 | Sonar cycle time in milliseconds |
|
| ||
SONAR1 | str | 12345678 | Ping sequence for sonar array #1. Up to 16 |
| |||
|
|
| number characters |
| |||
SONAR2 | str | 0 | Ping sequence for array #2. See sonar1 above |
| |||
SONAR3 | str | 0 | Ping sequence for array #3. See sonar1 above |
| |||
SONAR4 | str | 0 | Ping sequence for array #4. See sonar1 above |
| |||
LOWBATTERY | int | 110 | In 1/10 volts; microcontroller alarm activated |
| |||
|
|
| when battery charge falls below this value. |
| |||
WATCHDOG | int | 2000 | Ms time before robot automatically stops if it |
| |||
|
|
| has not received a command from a client. |
| |||
|
|
| Restarts on restoration of connection. |
| |||
REVCOUNT | int | 36300 | The number of differential encoder ticks for a |
| |||
|
|
| 360 degree revolution of the robot. |
|
| ||
SOUNDTOG | byte | 1 | 0 disables the buzzer |
|
|
| |
P2MPACS | byte | 0 | 1 enables alternative SIP. |
|
|
| |
STALLVAL | int | 200 | Maximum PWM before stall. If > PwmMax, never. |
| |||
STALLCOUNT | int | 100 | Ms time after a stall for recovery. Motors not |
| |||
|
|
| engaged during this time. |
|
|
| |
HASGYRO | byte | 0 | Set to 1 if you have the gyro accessory |
| |||
CHARGER | byte | 0 | Set to 1 if P3 or 2 if PowerBot autocharger |
| |||
|
|
| mechanism and circuitry installed; otherwise 0 |
| |||
GRIPPER | byte | 0 | Set to 1 if P2/P3 Gripper; 2 if Gripper on |
| |||
|
|
| Performance PeopleBot |
|
|
| |
TCM2 | byte | 0 | TCM2 module connected to 1=AUX1 or 2=AUX2 |
| |||
LEDGESENSE | byte | 0 | 0=none; 1=stop on detect; 2=limit speed; 3=stop |
| |||
|
|
| and limit speed |
|
|
| |
BUMPSTALL | byte | 3 | 0=disable bump stall; 1=enable rear; 2=enable |
| |||
|
|
| front; 3=enable both front and rear bump stalls |
| |||
INVERTBUMP | byte | 0 | 0=none; 1=front; 2=rear; or 3=invert both front |
| |||
|
|
| and rear bumper signals |
|
|
| |
FRONTBUMPS | byte | 0 | Number of front bumper segments |
|
| ||
REARBUMPS | byte | 0 | Number of rear bumper segments |
|
| ||
ROTVELMAX | int | 200 | Max rotational speed; deg/sec. |
|
| ||
TRANSVELMAX | int | 2000 | Max translational speed; mm/sec. |
|
| ||
ROTACC | int | 100 | Rotational acceleration; deg/sec2 |
|
| ||
ROTDECEL | int | 100 | Rotational deceleration; deg/sec2 |
|
| ||
57