E6581741
4.6. Control Supervisor Object (0x29)
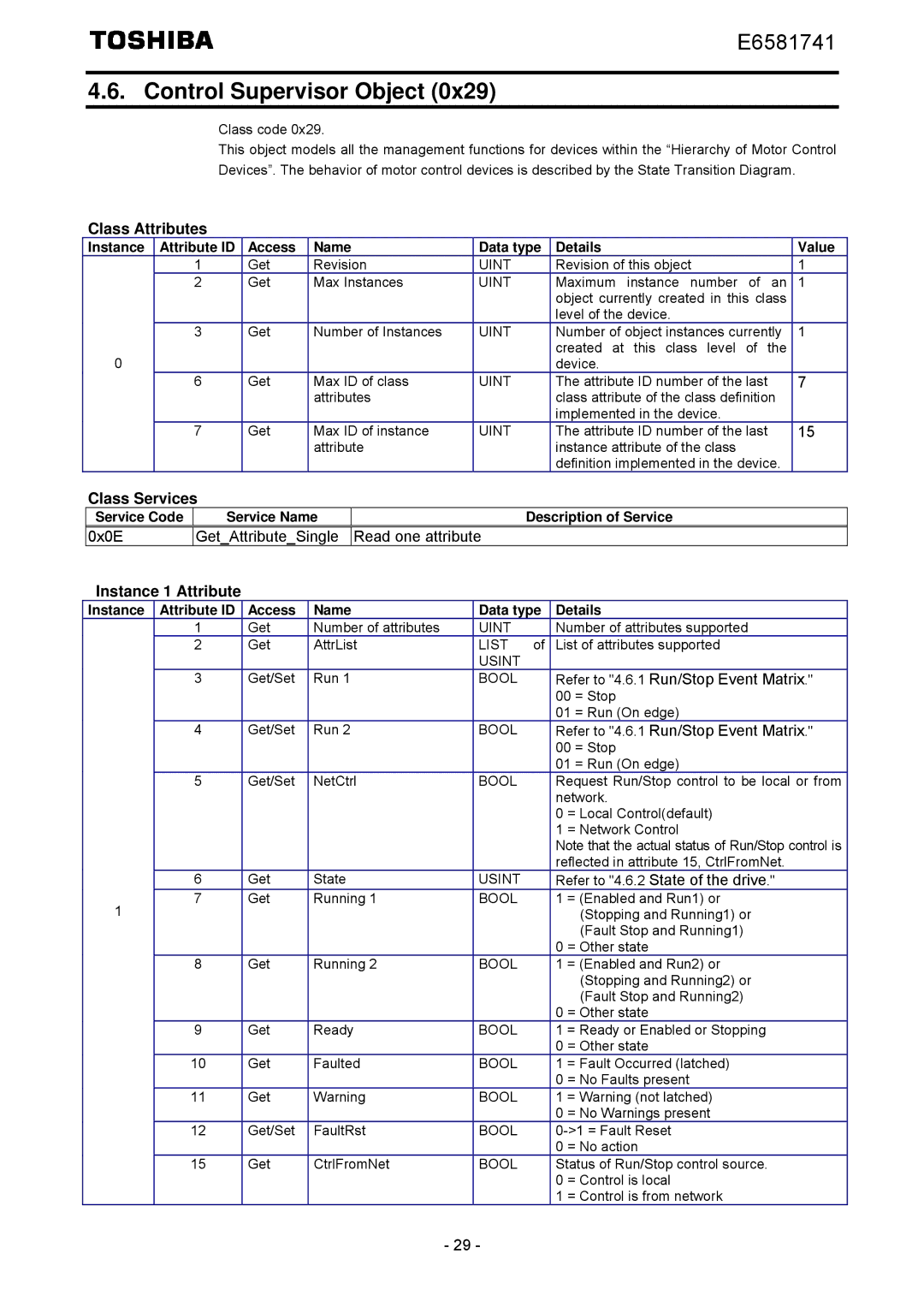
Class code 0x29.
This object models all the management functions for devices within the “Hierarchy of Motor Control Devices”. The behavior of motor control devices is described by the State Transition Diagram.
Class Attributes
Instance | Attribute ID | Access | Name | Data type | Details | Value |
| 1 | Get | Revision | UINT | Revision of this object | 1 |
| 2 | Get | Max Instances | UINT | Maximum instance number of an | 1 |
|
|
|
|
| object currently created in this class |
|
|
|
|
|
| level of the device. |
|
| 3 | Get | Number of Instances | UINT | Number of object instances currently | 1 |
0 |
|
|
|
| created at this class level of the |
|
|
|
|
| device. |
| |
| 6 | Get | Max ID of class | UINT | The attribute ID number of the last | 7 |
|
|
| attributes |
| class attribute of the class definition |
|
|
|
|
|
| implemented in the device. |
|
| 7 | Get | Max ID of instance | UINT | The attribute ID number of the last | 15 |
|
|
| attribute |
| instance attribute of the class |
|
|
|
|
|
| definition implemented in the device. |
|
Class Services
Service Code | Service Name |
Description of Service
0x0E
Get_Attribute_Single Read one attribute
Instance 1 Attribute
Instance | Attribute ID | Access | Name | Data type | Details | ||
| 1 | Get | Number of attributes | UINT |
| Number of attributes supported | |
| 2 | Get | AttrList | LIST | of | List of attributes supported | |
|
|
|
| USINT |
|
|
|
| 3 | Get/Set | Run 1 | BOOL |
| Refer to "4.6.1 Run/Stop Event Matrix." | |
|
|
|
|
|
| 00 = Stop | |
|
|
|
|
|
| 01 = Run (On edge) | |
| 4 | Get/Set | Run 2 | BOOL |
| Refer to "4.6.1 Run/Stop Event Matrix." | |
|
|
|
|
|
| 00 = Stop | |
|
|
|
|
|
| 01 = Run (On edge) | |
| 5 | Get/Set | NetCtrl | BOOL |
| Request Run/Stop control to be local or from | |
|
|
|
|
|
| network. | |
|
|
|
|
|
| 0 | = Local Control(default) |
|
|
|
|
|
| 1 | = Network Control |
|
|
|
|
|
| Note that the actual status of Run/Stop control is | |
|
|
|
|
|
| reflected in attribute 15, CtrlFromNet. | |
| 6 | Get | State | USINT |
| Refer to "4.6.2 State of the drive." | |
1 | 7 | Get | Running 1 | BOOL |
| 1 | = (Enabled and Run1) or |
|
|
|
|
|
| (Stopping and Running1) or | |
|
|
|
|
|
|
| (Fault Stop and Running1) |
|
|
|
|
|
| 0 | = Other state |
| 8 | Get | Running 2 | BOOL |
| 1 | = (Enabled and Run2) or |
|
|
|
|
|
|
| (Stopping and Running2) or |
|
|
|
|
|
|
| (Fault Stop and Running2) |
|
|
|
|
|
| 0 | = Other state |
| 9 | Get | Ready | BOOL |
| 1 | = Ready or Enabled or Stopping |
|
|
|
|
|
| 0 | = Other state |
| 10 | Get | Faulted | BOOL |
| 1 | = Fault Occurred (latched) |
|
|
|
|
|
| 0 | = No Faults present |
| 11 | Get | Warning | BOOL |
| 1 | = Warning (not latched) |
|
|
|
|
|
| 0 | = No Warnings present |
| 12 | Get/Set | FaultRst | BOOL |
| ||
|
|
|
|
|
| 0 | = No action |
| 15 | Get | CtrlFromNet | BOOL |
| Status of Run/Stop control source. | |
|
|
|
|
|
| 0 | = Control is local |
|
|
|
|
|
| 1 | = Control is from network |
- 29 -