E6581741
5.1.7.Instance 101: Native drive output
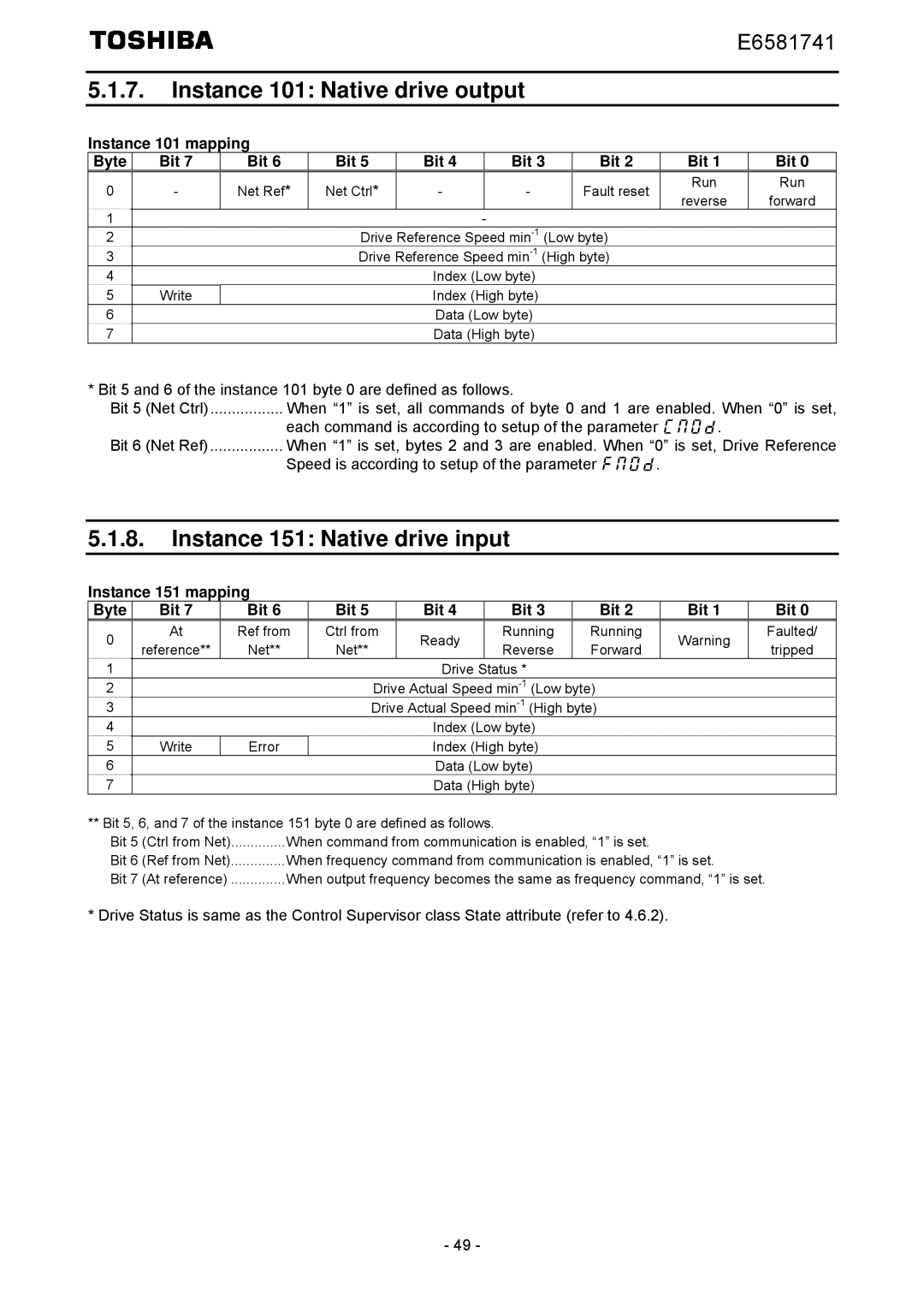
Instance 101 mapping
Byte | Bit 7 | Bit 6 |
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0 | - | Net Ref* | Net Ctrl* | - |
| - | Fault reset | Run | Run |
| reverse | forward | |||||||
1 |
|
|
|
|
|
|
| ||
|
|
|
| - |
|
|
| ||
2 |
|
| Drive Reference Speed |
|
| ||||
3 |
|
| Drive Reference Speed |
|
| ||||
4 |
|
|
| Index (Low byte) |
|
|
| ||
5 | Write |
|
| Index (High byte) |
|
|
| ||
6 |
|
|
| Data (Low byte) |
|
|
| ||
7 |
|
|
| Data (High byte) |
|
|
| ||
* Bit 5 and 6 of the instance 101 byte 0 are defined as follows.
Bit 5 (Net Ctrl)................. When “1” is set, all commands of byte 0 and 1 are enabled. When “0” is set,
each command is according to setup of the parameter cmod.
Bit 6 (Net Ref)................. When “1” is set, bytes 2 and 3 are enabled. When “0” is set, Drive Reference
Speed is according to setup of the parameter fmod.
5.1.8.Instance 151: Native drive input
Instance 151 mapping
Byte | Bit 7 | Bit 6 |
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0 | At | Ref from | Ctrl from | Ready | Running | Running | Warning | Faulted/ | |
reference** | Net** | Net** | Reverse | Forward | tripped | ||||
|
|
| |||||||
1 |
|
|
| Drive Status * |
|
|
| ||
2 |
|
| Drive Actual Speed |
|
| ||||
3 |
|
| Drive Actual Speed |
|
| ||||
4 |
|
|
| Index (Low byte) |
|
|
| ||
5 | Write | Error |
| Index (High byte) |
|
|
| ||
6 |
|
|
| Data (Low byte) |
|
|
| ||
7 |
|
|
| Data (High byte) |
|
|
| ||
** Bit 5, 6, and 7 of the instance 151 byte 0 are defined as follows.
Bit 5 | (Ctrl from Net)..............When command from communication is enabled, “1” is set. |
Bit 6 | (Ref from Net)..............When frequency command from communication is enabled, “1” is set. |
Bit 7 | (At reference) ..............When output frequency becomes the same as frequency command, “1” is set. |
* Drive Status is same as the Control Supervisor class State attribute (refer to 4.6.2).
- 49 -