PowerH SERIES
8 Interface RS-232
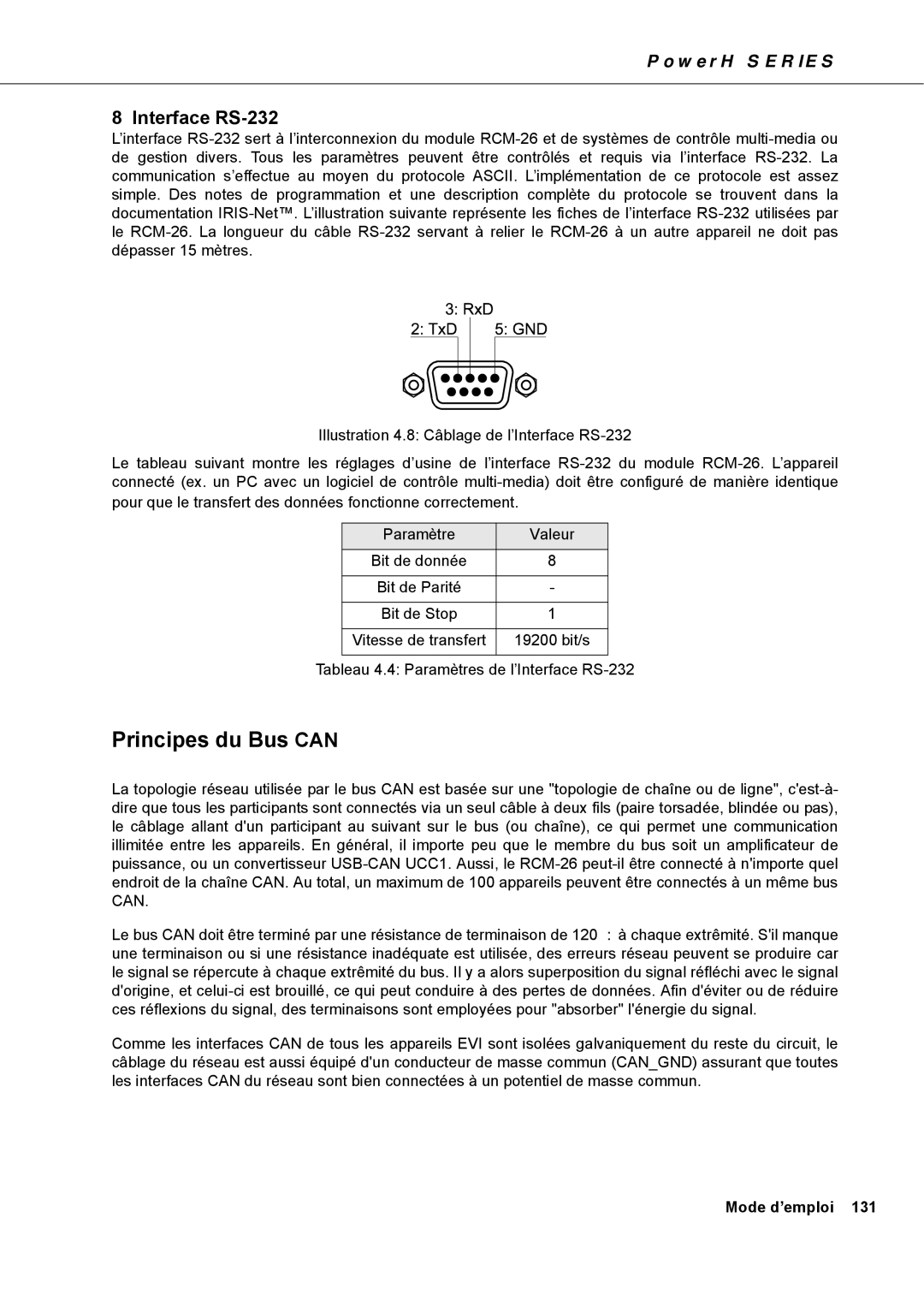
L’interface RS-232 sert à l’interconnexion du module RCM-26 et de systèmes de contrôle multi-media ou de gestion divers. Tous les paramètres peuvent être contrôlés et requis via l’interface RS-232. La communication s’effectue au moyen du protocole ASCII. L’implémentation de ce protocole est assez simple. Des notes de programmation et une description complète du protocole se trouvent dans la documentation IRIS-Net™. L’illustration suivante représente les fiches de l’interface RS-232 utilisées par le RCM-26. La longueur du câble RS-232 servant à relier le RCM-26 à un autre appareil ne doit pas dépasser 15 mètres.
Illustration 4.8: Câblage de l’Interface RS-232
Le tableau suivant montre les réglages d’usine de l’interface RS-232 du module RCM-26. L’appareil connecté (ex. un PC avec un logiciel de contrôle multi-media) doit être configuré de manière identique pour que le transfert des données fonctionne correctement.
Paramètre | Valeur |
Bit de donnée | 8 |
| |
Bit de Parité | - |
| |
Bit de Stop | 1 |
| |
Vitesse de transfert | 19200 bit/s |
| |
Tableau 4.4: Paramètres de l’Interface RS-232
Principes du Bus CAN
La topologie réseau utilisée par le bus CAN est basée sur une "topologie de chaîne ou de ligne", c'est-à- dire que tous les participants sont connectés via un seul câble à deux fils (paire torsadée, blindée ou pas), le câblage allant d'un participant au suivant sur le bus (ou chaîne), ce qui permet une communication illimitée entre les appareils. En général, il importe peu que le membre du bus soit un amplificateur de puissance, ou un convertisseur USB-CAN UCC1. Aussi, le RCM-26 peut-il être connecté à n'importe quel endroit de la chaîne CAN. Au total, un maximum de 100 appareils peuvent être connectés à un même bus CAN.
Le bus CAN doit être terminé par une résistance de terminaison de 120 Ω à chaque extrêmité. S'il manque une terminaison ou si une résistance inadéquate est utilisée, des erreurs réseau peuvent se produire car le signal se répercute à chaque extrêmité du bus. Il y a alors superposition du signal réfléchi avec le signal d'origine, et celui-ci est brouillé, ce qui peut conduire à des pertes de données. Afin d'éviter ou de réduire ces réflexions du signal, des terminaisons sont employées pour "absorber" l'énergie du signal.
Comme les interfaces CAN de tous les appareils EVI sont isolées galvaniquement du reste du circuit, le câblage du réseau est aussi équipé d'un conducteur de masse commun (CAN_GND) assurant que toutes les interfaces CAN du réseau sont bien connectées à un potentiel de masse commun.